![]()
Корисничко упатство за Pickerbot Pro
Имајте предвид дека прикажаните слики се само за илустративни цели*.
Автори: Вејн Лиу, Рајли Смитерс
3 јули 2024 година
РЕЗИМЕ
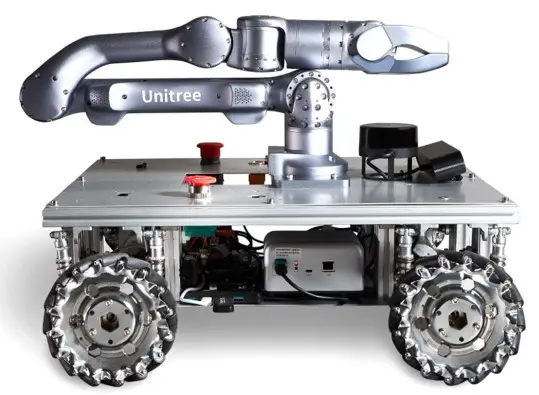
Pickerbot Pro е разноврсна платформа за роботика за истражување и развој која може да се користи за различни апликации, како на отворено, како што се земјоделство, рударство и градежништво, така и во затворени простории, вклучувајќи логистика со помош на роботи, демонстрации за пребарување и спасување и мапирање.
Со роботска рака Unitree Z1 Pro со дофат од 740 мм и носивост од 3 кг, Pickerbot Pro нуди импресивна артикулација со 6 степени на слобода, заедно со повратни информации од сила и способности за откривање судир.
Напојуван од NVIDIA Jetson Orin-компјутер со една плоча (нано или NX варијанта), обезбедува понапредни задачи за компјутерска визија и машинско учење со моќна графика или паралелна компјутерска функционалност со помош на CUDA, додека задржува компактен и лесен дизајн.
Pickerbot Pro е опремен со Orbbec 3D Astra камера, обезбедувајќи сензори за длабочина, следење објекти и можности за препознавање гестови.
Изграден на цврста, но лесна шасија, Pickerbot Pro располага со систем 4WD со независна суспензија за подобрена навигација низ нерамниот терен. Големите меканиумски тркала обезбедуваат прецизно сенасочно движење, а сепак високо држење.
Клучни компоненти и хардвер
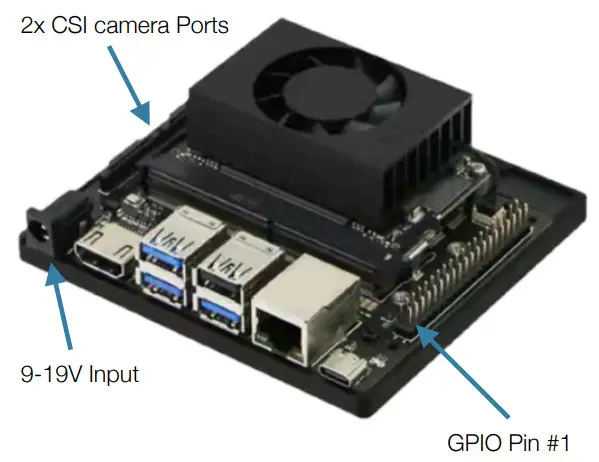
1.1 ROS 2 контролер: NVIDIA Jetson Orin (NX 8GB или Nano 4GB)
Вградениот компјутер со една плоча Jetson Orin обезбедува моќно вградено пресметување на Pickerbot Pro. Доаѓа со 128gb SSD, Intel Wireless картичка и вградени антени, HDMI, четири USB порти (од кои 3 се USB 3.0), Ethernet и USB-C. DC буре приклучок за напојување на плочата, користејќи помеѓу 9-19V. Вградените GPIO пинови го користат истиот основен распоред како и популарните компјутери со една плоча Raspberry Pi, почнувајќи со пин #1 на надворешниот ред, во непосредна близина на етернет-портата. Исто така, два CSI конектори за камера овозможуваат функционалност со брендот Raspberry Pi и слични камери со мал фактор.
Претходно инсталираниот софтвер вклучува ROS 2 Humble, Ubuntu 22.04 и NVIDIA Jetpack, овозможувајќи ја целосната способност на платформата Orin.
Забелешка: За да се одржи компатибилноста со контролерот на шасијата и другите роботски компоненти, не препорачуваме трепкање на Jetson Orin со различен софтвер. За понапредни случаи на употреба, ве молиме контактирајте со поддршката на Roboworks.
1.2 Систем за сензори: LiDAR и длабинска камера
Pickerbot Pro е опремен со Leishen M10 LSLiDAR. Со максимален опсег на откривање од 30 m и ротациона фреквенција на скенирање од 12 Hz и висок сооднос сигнал-шум, што ја елиминира потребата за дополнително филтрирање. Беспрекорно се интегрира, обезбедувајќи одлични можности за мапирање и навигација.
Дополнително, Pickerbot Pro е опремен со Orbbec Astra Depth Camera, што е RGB камера за длабочина. Оваа камера е оптимизирана за низа намени, вклучувајќи контрола на гестови, следење скелет, 3D скенирање, откривање објекти и развој на облак со точки со ROS 2.
| Резолуција на длабочина | RGB резолуција | RGB сетилен агол | Длабочина FPS | RGB Framerate | Длабочина рамка | Опсег на длабочина |
| 640×480 | 640×480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30 fps | 30 fps | 0.6-4 м |
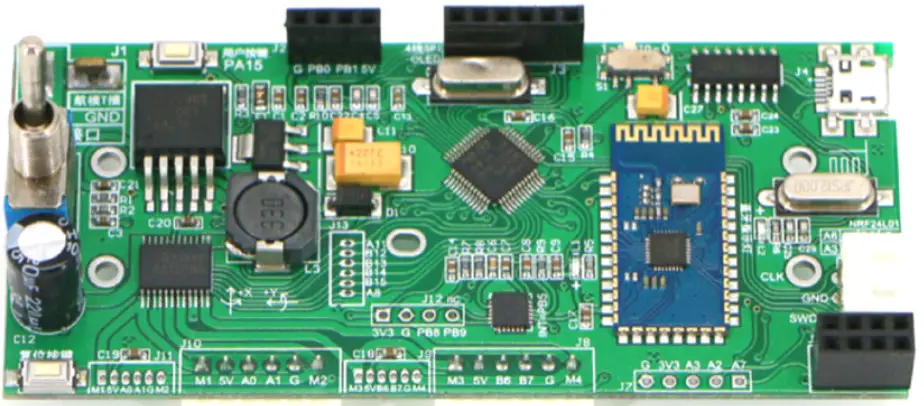
1.3 Контролна табла STM32 (Контрола на мотори и IMU)
За контрола на шасијата и моторот, Pickerbot Pro има контролна табла STM32. Оваа плочка обезбедува мала потрошувачка на енергија, прецизна контрола на моторот, OLED дисплеи за читање за следење на моторите и инерцијална мерна единица (IMU). Може да се конфигурира за поспецијализирана работа или да овозможи повратни информации од енкодерот до контролерот Jetson Orin. Користење на софтверските пакети Keil и FlyMCU за компилација и последователно трепкање на STM32F103.
| STM32F103RC | Карактеристики |
| Јадро | ARM32-bit Cortex -M3 CPU Максимална брзина од 72 MHz |
| Спомени | 512 KB флеш меморија 64 kB SRAM |
| Часовник, ресетирање и управување со снабдувањето | Напојување со апликации и влезови од 2.0 до 3.6 V |
| Моќ | Спиј. Режими за стоп и мирување V снабдување за RTC и резервни регистри BAT |
| DMA | 12-канален DMA контролер |
| Режим за отстранување грешки | SWD и ЈTAG интерфејси Cortex-M3 Embedded Trace Macrocell |
| I/O порти | 51 I/O порти (може да се мапира на 16 надворешни вектори за прекин и толерантни 5V) |
| Тајмери | 4×16-битни тајмери 2 x 16-битни PWM тајмери за контрола на моторот (со итно запирање) 2 x тајмери за чувари (независни и прозорец) SysTick тајмер (24-битен тајмер) 2 x 16-битни основни тајмери за возење на DAC |
| Комуникациски интерфејс | USB 2.0 интерфејс со целосна брзина SDIO интерфејс CAN интерфејс (2.0B активен) |
1.4 Над шасијатаview и Опции за батерија
Pickerbot Pro е опремен со сенасочни Mecanum тркала, од кои секое има ролери со поместување од 45 степени кои го олеснуваат движењето во сите правци. Од клучно значење е да се забележи дека овие тркала се испорачуваат во парови, при што секој пар има ролери различно ориентирани. За време на инсталацијата на роботот, проверете дали дијагонално спротивставените тркала имаат ролери кои се насочени во иста насока. Ако роботот се движи неочекувано, едноставно превртете ги паровите тркала.
Мора да се земат предвид при зголемување на капацитетот на батеријата. Pickerbot Pro стандардно доаѓа со батерија од 5000 mAh и може да се надгради до опции од 10,000 или 20,000 mAh за дополнителни трошоци. Батеријата од 20,000 mAh е премногу голема за да се вклопи во шасијата на Pickerbot Pro и може да се инсталира само на врвот на шасијата на роботот. Ве молиме погледнете ја табелата подолу за параметрите за тежина и големина.
| Параметар на батеријата | Карактеристики | ||
| 5000 mAh | 10000 mAh | 20000 mAh | |
| Батерија Voltage | 22.2V | 22.2V | 22.2V |
| Големина | 124*71*42мм | 124*71*71мм | 156*122*71мм |
| Полнач за напојување | DC 5.5 Приклучок за полнење Приклучок за празнење во форма на Т |
DC 5.5 Приклучок за полнење Приклучок за празнење во форма на Т |
DC 5.5 Приклучок за полнење Приклучок за празнење во форма на Т |
| Изведба | 15А континуирано d е полнење |
30А континуирано празнење | 60А континуирано празнење |
| Тежина | 0.66 кг | 1.25 кг | 2.4 кг |
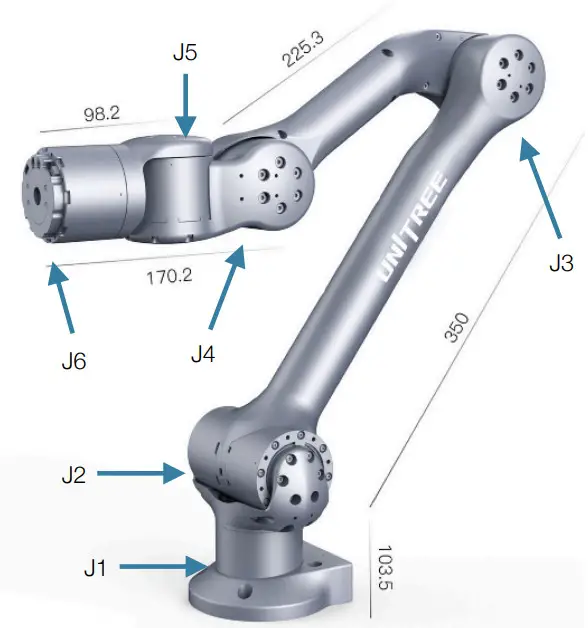
1.5 Unitree Z1 Pro роботска рака
Pickerbot Pro ја вклучува роботската рака Unitree Z1 Pro, која обезбедува импресивна артикулација со 6 степени на слобода и дофат од 740 mm. Ве молиме погледнете ја табелата за заеднички параметри подолу за приспособување на кинематиката за да одговара на вашите специфични барања.
| Заеднички | Опсег на движење | Максимална брзина | Макс вртежен момент |
| J1 | ±150° | 180°/s | 33 N·m |
| J2 | 0-180° | 180°/s | 33 N·m |
| J3 | -165°-0 | 180°/s | 33 N·m |
| J4 | ±80° | 180°/s | 33 N·m |
| J5 | ±85° | 180°/s | 33 N·m |
| J6 | ±160 | 180°/s | 33 N·m |
| Параметар | Z1 Pro |
| Тежина | 4.5 кг |
| Оптоварување | 3 кг |
| Достигнете | 740 мм |
| Повторливост | ~ 0.1 мм |
| Напојување | 24V |
| Интерфејс | Етернет |
| Компатибилен оперативен систем | Убунту |
| Максимална моќност | 500 W |
| Присили повратни информации | Да |
Софтвер и почеток
2.1 ROS 2 Брз почеток
Кога роботот е првпат вклучен, стандардно е контролиран од ROS. Што значи, контролната плоча на шасијата STM32 прифаќа команди од контролорот ROS 2 - Jetson Orin.
Почетното поставување е брзо и лесно, од вашиот компјутер-домаќин (се препорачува Ubuntu Linux) поврзете се на точката за Wi-Fi на роботот. Стандардно, лозинката е „dongguan“.
Следно, поврзете се со робот користејќи SSH преку терминалот Linux, IP адресата е 192.168.0.100, стандардната лозинка е dongguan.
![]()
Со терминален пристап до роботот, можете да отидете во папката работниот простор ROS 2, под „wheeltec_ROS 2“ Пред да се стартуваат програмите за тестирање, одете до wheeltec_ROS 2/turn_on_wheeltec_robot/ и лоцирајте wheeltec_udev.sh – Оваа скрипта мора да се извршува, обично само еднаш за да се обезбеди правилна конфигурација на периферните уреди.
Сега можете да ја тестирате функционалноста на роботот, за да ја стартувате функционалноста на контролорот ROS 2, стартувајте: „roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch“
![]()
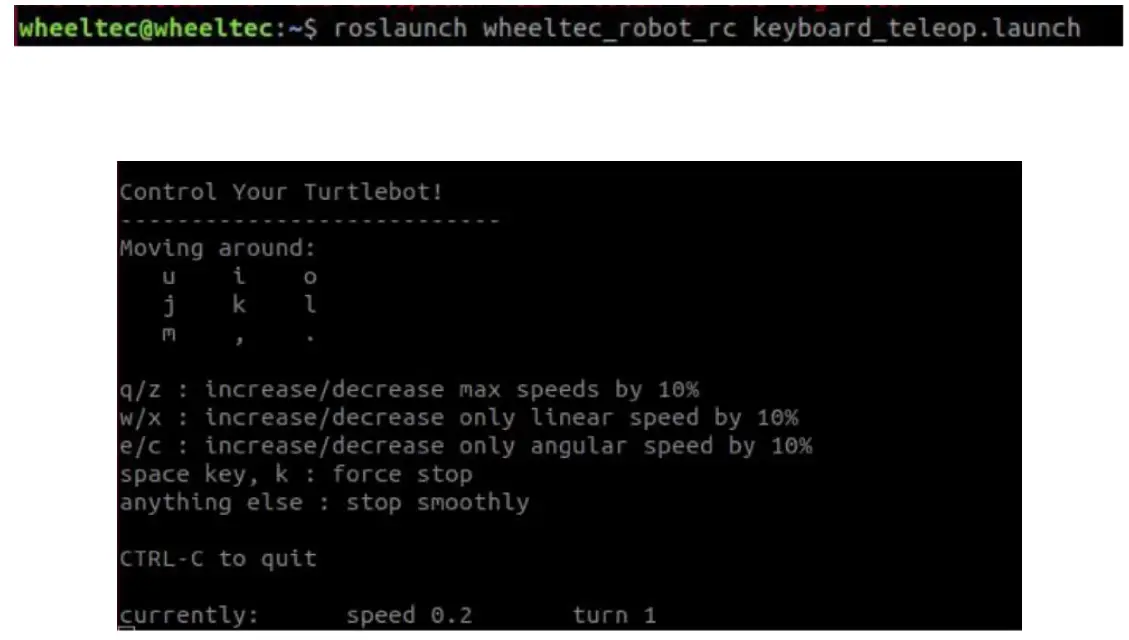
Во вториот терминал, можете да го користите јазолот keyboard_teleop за да ја потврдите контролата на шасијата, ова е изменета верзија на популарниот ROS 2 Turtlebot exampле. Тип: „roslaunch wheeltec_robot_rc keyboard_teleop.launch“
2.2 Претходно инсталирани ROS 2 пакети за шасијата
Подолу се следните кориснички ориентирани пакети, додека може да има други пакети, тоа се само зависности.
turn_on_wheeltec_robot
Овој пакет е клучен за овозможување функционалност на роботот и комуникација со контролорот на шасијата.
Примарната скрипта „turn_on_wheeltec_robot.launch“ мора да се користи при секое подигање за да се конфигурираат ROS 2 и контролерот.
wheeltec_rviz2
Содржи датотеки за лансирање за стартување rviz со прилагодена конфигурација за Pickerbot Pro.
wheeltec_robot_slam
Пакет за мапирање и локализација на SLAM со прилагодена конфигурација за Pickerbot Pro.
wheeltec_robot_rrt2
Брзо истражување на алгоритам на случајно дрво – Овој пакет му овозможува на Pickerbot Pro да планира патека до саканата локација, со лансирање на истражувачки јазли.
wheeltec_robot_keyboard
Практичен пакет за валидација на функционалноста на роботот и контрола со помош на тастатура, вклучително и од оддалечен компјутер домаќин.
wheeltec_robot_nav2
ROS 2 Navigation 2 јазол пакет.
wheeltec_lidar_ROS 2
ROS 2 Lidar пакет за конфигурирање на Leishen M10/N10.
wheeltec_joy
Пакетот за контрола на џојстик, содржи датотеки за стартување за јазли на Џојстик.
simple_follower_ROS 2
Основни алгоритми за следење на објект и линија користејќи ласерско скенирање или длабинска камера.
ROS 2_astra_camera
Пакет за длабинска камера Astra со двигатели и датотеки за стартување.
Интеграција на роботска рака
3.1 Компоненти за жици за роботска рака
Препорачано поврзување со Unitree Z1
Подолу се препорачаните компоненти за жици за раката Unitree Z1. Треба да има достапен женски 2-полен декан конектор на избивање по прекинувачот за напојување. Поврзете ги компонентите во серија. Проверете дали поврзувањата на конекторот +/GND се совпаѓаат. Држачот на осигурувачот на сечилото треба да седи на позитивната линија за напојување.
| Компонента | Количина |
| Приклучок со 2 полови во стилот на машки декани | x1 |
| Машки xt60 стил 2-полен конектор | x1 |
| Вграден држач за осигурувачи на сечилото | x1 |
| 14 AWG кабел со 2 јадра | x1 |
| 7.5 Осигурувач со сечила | x1 |
Бидејќи раката има само релативни енкодери, таа мора да се ресетира на истата позиција при секое стартување. Можеби ви е вредно да прикачите прекинувач во серија во кабелот за лесно вклучување и исклучување на раката за ресетирање.
ЗАБЕЛЕШКА: Документацијата на Unitree вели дека раката е оценета за 20А. Ова е неточно. Осигурувач од 10A SMD е прикачен во серија за секое напојување. Употребата на осигурувач од 7.5 А ќе дува пред осигурувачот 10А SMD и ќе биде значително полесна за замена.
ЗАБЕЛЕШКА: Поради дополнителната тежина на единечната рака Z1 на системот, предните пружини не можат да ја поддржат раката. Компресивните пружини со капка 70mm*16mm може да се најдат и да се користат наместо залихите. Алтернативно, може да се користат големи пружини што го опфаќаат ударот.
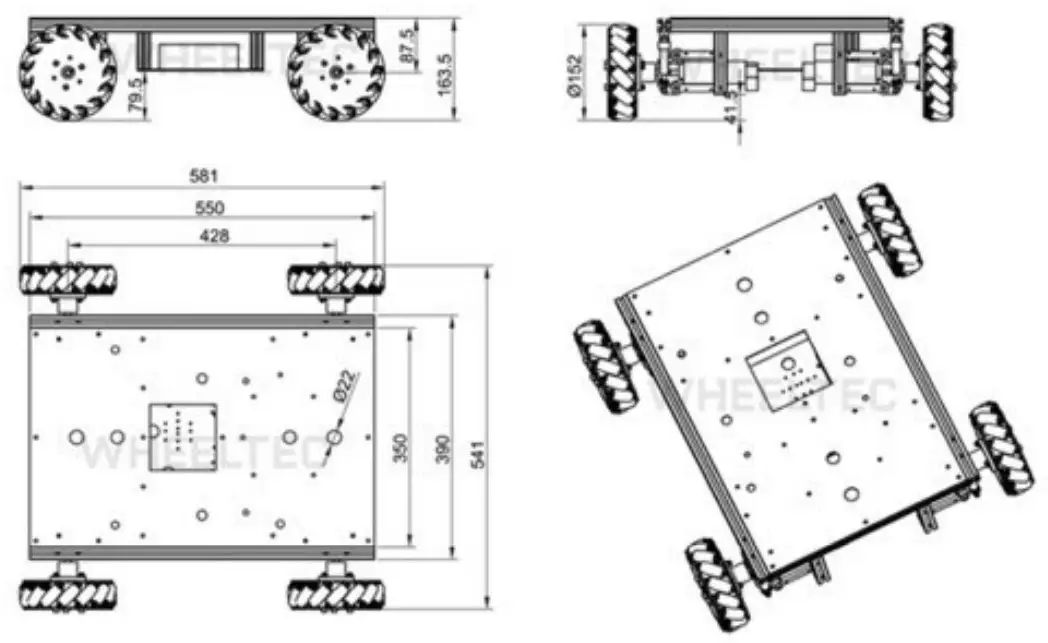
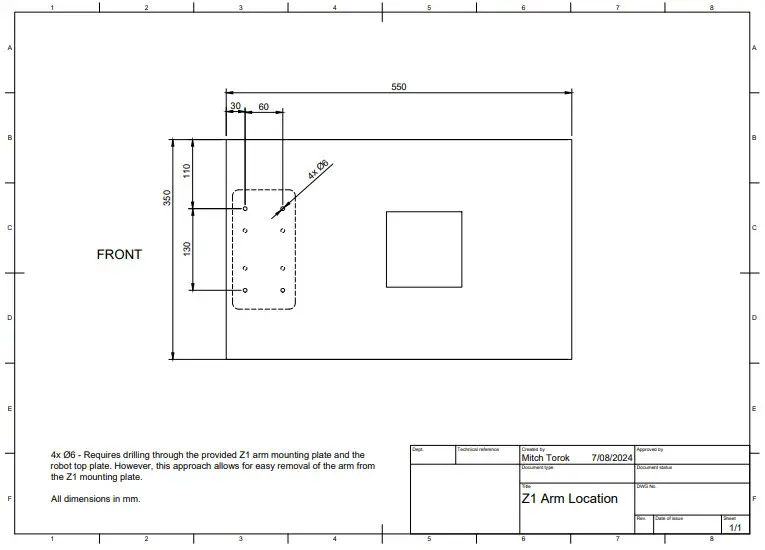
3.2 Цртежи за монтирање на роботска рака
3.3 Сampкод за роботска рака
Во моментот кога се подготвува ова упатство за употреба, SDK на Unitree за Z1 Pro поддржува само ROS 1 Melodic или Noetic.
Тимот на производи Pickerbot Pro разви sampле код во ROS 2 Humble компатибилен со шасијата.
С.ampКодот за интегрирање на роботската рака Z1 Pro со шасијата може да се најде од долунаведеното складиште на GitHub:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
Авторски права © 2024 Roboworks. Сите права се задржани.
Документи / ресурси
 |
ROBOWORKS Pickerbot Pro Pick and Drop Mobile Robot [pdf] Упатство за користење Pickerbot Pro, Pickerbot Pro Pick and Drop Mobile Robot, Pick and Drop Mobile Robot, Drop Mobile Robot, Mobile Robot, Robot |