![]()
T86-IO двигател на чекори за затворена јамка
Упатство за употреба
Шенжен Rtelligent механичка електрична технологија копродукции, Ltd
Производот завршиview
Ви благодариме што го избравте дигиталниот степер серво драјвер од серијата Rtelligent T. Степер серво е шема на чекор мотор формирана врз основа на заедничкиот чекорен мотор со отворен циклус во комбинација со повратни информации за позицијата и серво алгоритам, кој се карактеризира со голема брзина, висок вртежен момент, висока прецизност, ниски вибрации, ниско загревање и без губење на чекорот. Врз основа на новата 32-битна платформа за процесорски чип DSP на TI, серво драјверот за чекори од T серијата користи контролен алгоритам ориентирана кон поле (FOC) и векторско слабеење на полето во серво драјверот, кој има перформанси да го надмине обичниот степер во сите аспекти. .
- Вградената функција за прилагодување на параметарот PID го прави моторот подобро да одговара на примената на различни видови оптоварувања.
- Вградениот контролен алгоритам за слабеење на полето го прави моторот да ги намалува карактеристиките на магнетното поле и да ја одржува моќноста со голема брзина.
- Вградената функција за контрола на векторот на струјата го прави моторот да ја има струјната карактеристика на серво и слабо загревање.
- Вградениот алгоритам за команда со микро чекорење прави моторот да може да работи додека одржува стабилни и ниски вибрации при различни брзини.
- Повратните информации од енкодерот со вградената резолуција на пулсот од 4000 ја зголемуваат прецизноста на позиционирањето и никогаш не го губи чекорот.
Како заклучок, шемата за контрола на серво во комбинација со карактеристиките на чекорниот мотор му овозможува на серво-двигателот на чекорот од серијата Т подобро да ги врши перформансите на чекорниот мотор, што може да ја замени серво апликацијата со иста моќност. Тоа е нов избор на оптимални перформанси на трошоците за опремата за автоматизација.
Возачот T86-IO може да постави поделби и други параметри преку DIP прекинувач и софтвер за дебагирање. Има заштитни функции како што се voltage, струја и позиција и додава интерфејс за излез за аларм. Неговите влезни и излезни контролни сигнали се оптички изолирани.
| Напојување | 20-80 VAC 24 –100 VDC |
| Контрола на прецизност | 4000 Пулс/р |
| Тековна контрола | Алгоритам за контрола на серво вектор |
| Поставки за брзина | Поставување на DIP прекинувач или поставување на софтвер за дебагирање |
| Опсег на брзина | Конвенционални 1200 ~ 1500 вртежи во минута, до 4000 вртежи во минута |
| Супресија на резонанца | Автоматски пресметајте ја точката на резонанца и инхибирајте ги вибрациите на IF |
| Прилагодување на параметарот PID | Тест софтвер за прилагодување на карактеристиките на PID на моторот |
| Филтрирање на пулсот | Филтер за дигитален сигнал од 2 MHz |
| Излез на аларм | Излез на аларм од прекумерна струја, над-волtagд, грешка во положбата итн |
Се надеваме дека нашите производи со одлични перформанси можат да ви помогнат успешно да ја завршите програмата за контрола на спортот.
Ве молиме прочитајте го овој технички прирачник пред да ги користите производите.
Апликациско опкружување и инсталација
Еколошки услов
| Ставка | Rtelligent T86-IO |
| Околина за инсталација | Избегнувајте прашина, масло и корозивна средина |
| Вибрации | 0.5 G (4.9 m/s2) макс |
| Работна температура/влажност | 0℃ ~ 45℃ / 90% RH или помалку (без кондензација) |
| Температура на чување и транспорт: | -10℃ ~ 70℃ |
| Ладење | Природно ладење / подалеку од изворот на топлина |
| Водоотпорна класа | IP54 |
Димензии на инсталација на драјверот

Барања за инсталација на драјвери
Ве молиме инсталирајте го двигателот вертикално или хоризонтално, со предниот дел нанапред, горниот дел нагоре за да се олесни ладењето.
За време на склопувањето, избегнувајте дупчење и други надворешни материи да паѓаат во возачот.
За време на склопувањето, користете завртка М3 за да ја поправите.
Кога има извор на вибрации (како што е дупчалка) блиску до положбата за инсталација, ве молиме користете вибрирачки апсорбер или гумена заптивка отпорна на вибрации.
Кога се инсталирани повеќе драјвери во контролниот кабинет, ве молиме внимавајте да резервирате доволно простор за доволно дисипација на топлина. Доколку е потребно, можете да ги конфигурирате вентилаторите за ладење за да обезбедите добри услови за дисипација на топлина во контролниот кабинет.
Порта за возачот и врска
Опис на функцијата на пристаништето
| Функција | Одделение | Дефиниција | Забелешки |
| Влез за напојување | AC | Влезно напојување со наизменична струја | AC 20-80V DC 24-100V |
| AC | Влезно напојување со наизменична струја | ||
| Моторна врска | A+ | Позитивен терминал на намотката фаза-А | Црвено |
| A- | Негативен терминал на намотката фаза-А | Жолта | |
| B+ | Позитивен терминал на намотување фаза-Б | Црното | |
| B- | Негативен терминал на намотување фаза-Б | Зелена | |
| Врска со енкодер | EB+ | Позитивен терминал на енкодер фаза Б | Зелена |
| EB- | Негативен терминал на енкодер фаза Б | Жолта | |
| EA+ | Позитивен терминал на енкодер фаза А | Браун | |
| ЕА- | Негативен терминал на енкодер фаза А | Бело | |
| VCC | Работна моќност на енкодерот 5V позитивен | Црвено | |
| ГНД | Работна моќност на енкодерот 5V заземјен терминал | Сино | |
| Пулсна врска | PUL+ | Започнете интерфејс за внесување | Ниво од 24 V |
| PUL- | |||
| D1R+ | Интерфејс за внесување насока | ||
| ДИР- | |||
| Овозможи терминал | ЕНА+ | Овозможи контролен интерфејс | |
| ЕНА- | |||
| Ман излез | ALM+ | Mann излез интерфејс | 24V. подолу |
| АЛМ- | |||
| На место излез | Pend+ | 40mA Излезен интерфејс на место | |
| Закачалка- |
Влез за напојување
Напојувањето на драјверот може да биде и наизменична струја и еднонасочна струја, а влезната јачинаtagопсегот е 20V~80VAC или 24V~100VDC.
Ве молиме не поврзувајте директно на комерцијална електрична енергија (220VAC)!
Референца за избор на моќност:
Voltage:
Степер моторот има карактеристики на намалување на вртежниот момент со зголемување на брзината на моторот, а влезната јачинаtage ќе влијае на ampлитуда на намалување на вртежниот момент со голема брзина. Правилно зголемување на волуменотtage од влезното напојување може да го зголеми излезниот вртежен момент на моторот при голема брзина.
Степер сервото има поголема брзина и излезен вртежен момент од обичниот степер. Затоа, ако сакате да добиете подобри перформанси со голема брзина, треба да ја зголемите јачината на напојувањетоtagе на возачот.
Тековно:
Работниот процес на драјверот е да го конвертира влезот со висока јачинаtagд и ниско-струја напојување во ниско-волуменtage и висока струја на двата краја на намотката на моторот. При реална употреба, соодветното напојување треба да се избере според моделот на моторот, вртежниот момент на оптоварување и други фактори.
Ефектите од регенерација волtage:
Кога работи чекор моторот, тој исто така ги задржува карактеристиките на генераторот. При забавување, кинетичката енергија акумулирана од товарот ќе се претвори во електрична енергија и ќе биде поставена на колото на возачот и на влезното напојување.
Обрнете внимание на поставувањето на времето за забрзување и забавување за да го заштитите возачот или напојувањето.
Кога возачот е исклучен, ќе го видите LED индикаторот на возачот вклучен кога ќе се повлече товарот за да се придвижи моторот, што исто така е под влијание на ова.
Врска со енкодер
Кодерот T86-IO е диференцијален излез A/B и е поврзан по соодветен редослед кога се користи.
| EB+ | EB- | EA+ | ЕА- | VCC | ГНД |
| Зелена | Жолта | Браун | Бело | Црвено | Сино |
Rtelligent е опремен со одредена должина на кабел за енкодер, Ве молиме купете продолжни кабли со различни должини според потребите за инсталација.
Моторна врска
Соодветниот мотор на двигателот T86-IO е соодветниот чекорен серво мотор од серијата T, а неговиот соодветен редослед за поврзување на моторот е фиксен и единствен.

| A+ | Црвено |
| A- | Жолта |
| B+ | Црното |
| B- | Зелена |
Контролен сигнал за поврзување
PUL, DIR Port: поврзување за команда за почеток и стоп
| и индикација за насока | 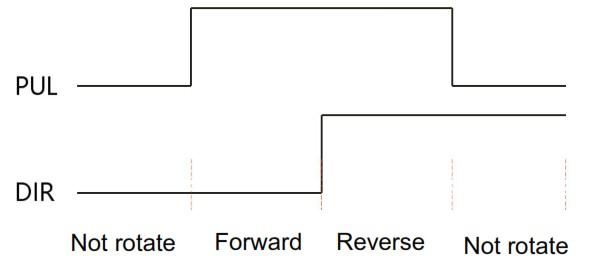 |
| 1. При вклучен PUL и исклучен DIR, моторот се активира за да се ротира напред. Кога PUL е исклучен, моторот забавува и запира. 2. При вклучен PUL и вклучен DIR, моторот се активира за да се ротира назад. Кога PUL е исклучен, моторот забавува и запира. 3. При исклучување на PUL, моторот запира. |
ENA порта: овозможи/оневозможи
Кога внатрешниот оптоспојувач е исклучен, возачот испушта струја на моторот;
Кога е вклучен внатрешниот оптоспојувач, возачот ќе ја прекине струјата на секоја фаза од моторот за да го ослободи моторот, а пулсот на чекорот нема да се реагира.
Кога моторот е во состојба на грешка, тој автоматски се исклучува. Логиката на ниво на сигналот за овозможување може да се постави спротивно.
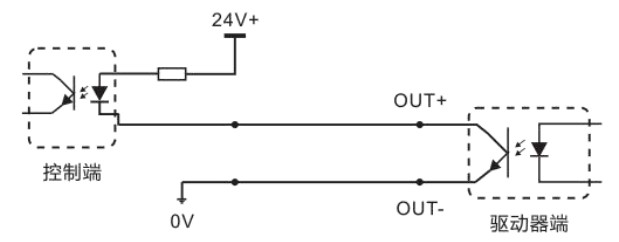
ALM, Pend порта: се користи за аларм и излез на место.
Приклучокот ALM се користи за излез на работниот статус на возачот во надворешно контролно коло. Кога возачот е во состојба на грешка и во нормална работна состојба, ALM емитува различни нивоа на оптоспојувач.
Приклучокот Pend се користи за излез на сигналот на возачот на место. Кога разликата (отстапување на положбата) помеѓу позицијата на пулсот на командата испратена од горниот компјутер и моменталната позиција на чекорниот серво мотор е помала од поставената вредност, се излегува сигналот на место. Горниот компјутер го прима сигналот и потврдува дека позиционирањето е завршено.
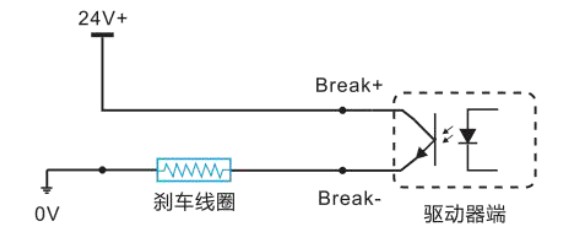
Дополнително, портите ALM и Pend можат повторно да се користат како сигнал за контрола на сопирачките (прекин) преку софтверско прилагодување, што се користи за контрола на прекинувачот за сопирачките на чекорниот серво мотор со сопирачка. Бидејќи серпентина на сопирачката е индуктивно оптоварување, а загревањето на серпентина е сериозно кога моторот работи, клиентите можат да изберат специјален контролер на сопирачките според нивните потреби за да го намалат загревањето на сопирачките и да го подобрат животниот век и доверливоста.
 Rtelligent обезбедува решенија за наменски контролори на сопирачките, на прampтие се како што следува:
Rtelligent обезбедува решенија за наменски контролори на сопирачките, на прampтие се како што следува:
RS232 сериска порта

| S/N | Симбол | Опис |
| 1 | NC | |
| 2 | +5 V | Позитивен терминал на напојување |
| 3 | TxD | RS232 предавател терминал |
| 4 | ГНД | Приземјен терминал на напојување |
| 5 | RxD | RS232 приемен терминал |
| 6 | NC |
Сериската порта RS232 се користи за поврзување на софтверот за тестирање T86-IO и промена на други поврзани работни параметри на драјверот.
Поставување на DIP прекинувачи и работни параметри

Поставување на брзина
| Брзина | SVV1 | SW2 | SW3 | SW4 | Забелешки |
| 100 | on | on | on | on | Другите брзини може да се прилагодат |
| 150 | исклучен | on | on | on | |
| 200 | on | исклучен | on | on | |
| 250 | исклучен | исклучен | on | on | |
| 300 | on | on | исклучен | on | |
| 400 | исклучен | on | исклучен | on | |
| 500 | on | исклучен | исклучен | on | |
| 600 | исклучен | исклучен | исклучен | on | |
| 700 | on | on | on | исклучен | |
| 800 | исклучен | on | on | исклучен | |
| 900 | on | исклучен | on | исклучен | |
| 1000 | исклучен | исклучен | on | исклучен | |
| 1100 | on | on | исклучен | исклучен | |
| 1200 | исклучен | on | исклучен | исклучен | |
| 1300 | on | исклучен | исклучен | исклучен | |
| 1400 | исклучен | исклучен | исклучен | исклучен |
Избор на насока на моторот
DIP SW5 се користи за поставување на насоката на работа на моторот под почетниот пулс. „Исклучено“ значи дека насоката на моторот е спротивно од стрелките на часовникот при внесување на почетниот пулс; „Вклучено“ значи дека насоката на моторот е во насока на стрелките на часовникот при внесување на почетниот пулс. Почетниот пулс е пулсот за тестирање што се користи при развивање на софтверот за двигател; Ве молиме погледнете ја вистинската насока на движење на моторот.
Избор на отворен/затворен циклус
DIP SW8 се користи за поставување на режимот за контрола на возачот.
„Исклучено“ значи контролен режим на затворена јамка;
„Вклучено“ значи контролен режим на отворена јамка и може да се користи за тестирање на моторот.
Работен статус на возачот LED индикација
| LED статус | Статус на возачот | |
| Зелениот индикатор е вклучен долго време | Возачот не е овозможен | |
| Зелениот индикатор трепка | Возачот работи нормално | |
| Еден зелен индикатор и еден црвен индикатор | Прекумерна струја на возачот | |
| Еден зелен индикатор и два црвени индикатори | Напојување на влезот на драјверотtage | |
| Еден зелен индикатор и три црвени индикатори | Внатрешниот волtagе од возачот не е во право | |
| Еден зелен и четири црвени индикатори | Грешката при следење ги надминува границите | |
| Еден зелен и пет црвени индикатори | Грешка во фазата на енкодерот | |
Вообичаени дефекти и решавање проблеми
| Феномен | Можни ситуации | Решенија |
| Моторот не работи | Индикаторот за напојување е исклучен | Проверете го колото за напојување за нормално напојување |
| Роторот на моторот е заклучен, но моторот не работи | Импулсниот сигнал е слаб; зголемете ја струјата на сигналот на 7-16mA | |
| Брзината е премногу бавна | Изберете го вистинскиот микро-чекори | |
| Возачот е заштитен | Решете го алармот и повторно напојувајте | |
| Овозможи проблем со сигналот | Повлечете или исклучете го сигналот за овозможување | |
| Командниот пулс е неточен | Проверете дали горниот компјутер има пулсен излез | |
| Управувањето на моторот е погрешно | Насоката на вртење на моторот е обратна | Прилагодете го DIP SW5 |
| Кабелот на моторот е исклучен | Проверете ја врската | |
| Моторот има само една насока | Грешка во пулсниот режим или портата DIR е оштетена | |
| Индикаторот за аларм е вклучен | Поврзувањето на моторот е погрешно | Проверете го поврзувањето на моторот |
| Поврзувањето на моторот и поврзувањето на енкодерот се погрешни | Проверете ја низата на поврзување на енкодерот | |
| Волtage е премногу висока или премногу ниска | Проверете го напојувањето | |
| Позицијата или брзината се погрешни | Сигналот е нарушен | Елиминирајте ги пречките за сигурно заземјување |
| Внесувањето на командата е неточно | Проверете ги горните упатства на компјутерот за да се уверите дека излезот е точен | |
| Поставувањето на Пулс по револуција е погрешно | Проверете го статусот на DIP прекинувачот и правилно поврзете ги прекинувачите | |
| Сигналот на енкодерот е ненормален | Заменете го моторот и контактирајте со производителот | |
| Терминалот за возачот изгорел |
Краток спој помеѓу терминалите коло |
Проверете го поларитетот на напојувањето или надворешниот краток спој |
| Внатрешниот отпор помеѓу терминалите е преголем | Проверете дали има топче за лемење поради прекумерно додавање на лемење на жичаните приклучоци | |
| Моторот е исклучен толеранција |
Времето за забрзување и забавување е прекратко | Намалете го забрзувањето на командата или зголемете ги параметрите за филтрирање на возачот |
| Вртежниот момент на моторот е премногу низок | Изберете го моторот со висок вртежен момент | |
| Товарот е премногу тежок | Проверете ја тежината и квалитетот на товарот и прилагодете ја механичката структура | |
| Струјата на напојувањето е премногу мала | Заменете го соодветното напојување |
Додаток А. Гарантна клаузула
А.1 Гарантен период: 12 месеци
Обезбедуваме гаранција за квалитет една година од датумот на испорака и бесплатна услуга за одржување на нашите производи за време на гарантниот период.
А.2 Исклучете го следново:
- Неправилното поврзување, како што е поларитетот на напојувањето е обратно и вметнете го/повлечете го приклучокот на моторот кога е приклучено напојувањето.
- Надвор од електричните и еколошките барања.
- Променете го внатрешниот уред без дозвола.
А.3 Процес на одржување
За одржување на производите, ве молиме следете ги постапките прикажани подолу:
- Контактирајте со нашиот персонал за услуги на клиентите за да добиете дозвола за преработка.
- Писмениот документ за феноменот на дефект на возачот е прикачен на стоката, како и информациите за контакт и методите за испраќање на испраќачот.
Адреса за пошта:
Поштенски код:
Тел.:
szruitech.com
Документи / ресурси
 |
RTELLIGENT T86-IO Степер драјвер за затворена јамка [pdf] Упатство за користење T86-IO, двигател за чекори за затворена јамка, двигател на чекори за затворена јамка T86-IO |



