STMicroelectronics VL53L5CX Повеќезонски сензор за опсег на време на летот

Вовед
Целта на ова упатство за корисникот е да објасни како да ракувате со сензорот за време на летот (ToF) VL53L5CX, користејќи го ултра лајт двигателот (ULD) API. Ги опишува главните функции за програмирање на уредот, калибрациите и излезните резултати.
VL53L5CX е најсовремен, ToF, повеќезонски сензор за опсег што го подобрува семејството на производи STMicroelectronics Flight Sense. Сместен во минијатурно пакување кое може да се прелива, тој интегрира SPAD низа, физички инфрацрвени филтри и дифрактивни оптички елементи (DOE) за постигнување на најдобри перформанси во различни услови на амбиентално осветлување со низа материјали за покривање стакло.
Можни се повеќезонски мерења на растојание до 8×8 зони со широко дијагонално поле од 63° view (FoV) што може да биде
намалена со софтвер. Секоја зона на VL53L5CX го мери растојанието на целта до 4 метри, на максимална фреквенција од 60 Hz.
Благодарение на STMicroelectronics патентираните хистограмски алгоритми, VL53L5CX може да детектира различни објекти во рамките на FoV.
Хистограмот, исто така, обезбедува имунитет за покривање на стаклени прекршоци над 60 см.

Референци
Лист со податоци VL53L5CX (DS13754).
Акроними и кратенки
| Акроним/кратенка | Дефиниција |
| DOE | дифрактивен оптички елемент |
| FoV | поле на view |
| I²C | интеринтегрирано коло (сериска магистрала) |
| Kcps/SPAD | Број на килограми во секунда по spad (единица која се користи за квантифицирање на бројот на фотони во низата SPAD) |
| RAM меморија | меморија со случаен пристап |
| SCL | линија на сериски часовник |
| СДА | сериски податоци |
| SPAD | единечна фотонска лавинска диода |
| ToF | Време на летот |
| ULD | ултра лајт драјвер |
| VCSEL | вертикална шуплина површина што емитува диода |
| ВХВ | многу висок волуменtage |
| Xtalk | вкрстување |
Функционален опис
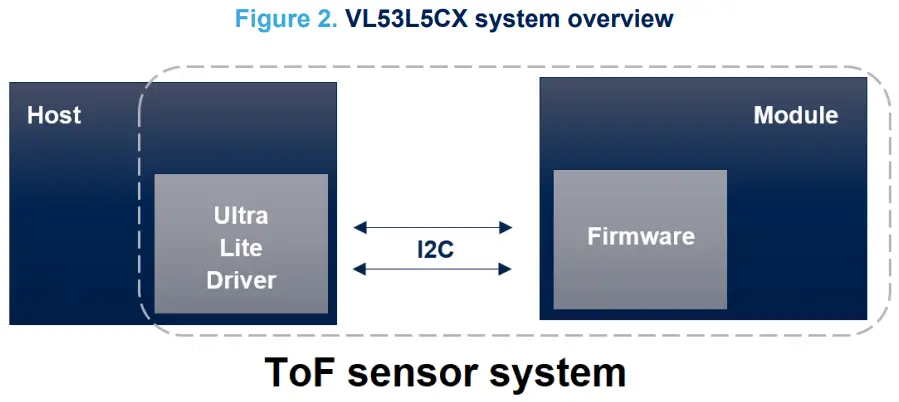
Системот завршиview
Системот VL53L5CX е составен од хардверски модул и ултра лајт софтвер за двигател (VL53L5CX ULD) што работи на домаќин (види слика подолу). Хардверскиот модул содржи ToF сензор. STMicroelectronics го испорачува двигателот на софтверот, кој во овој документ е наведен како „двигател“. Овој документ ги опишува функциите на возачот, кои се достапни за домаќинот. Овие функции го контролираат сензорот и ги добиваат податоците за опсегот.
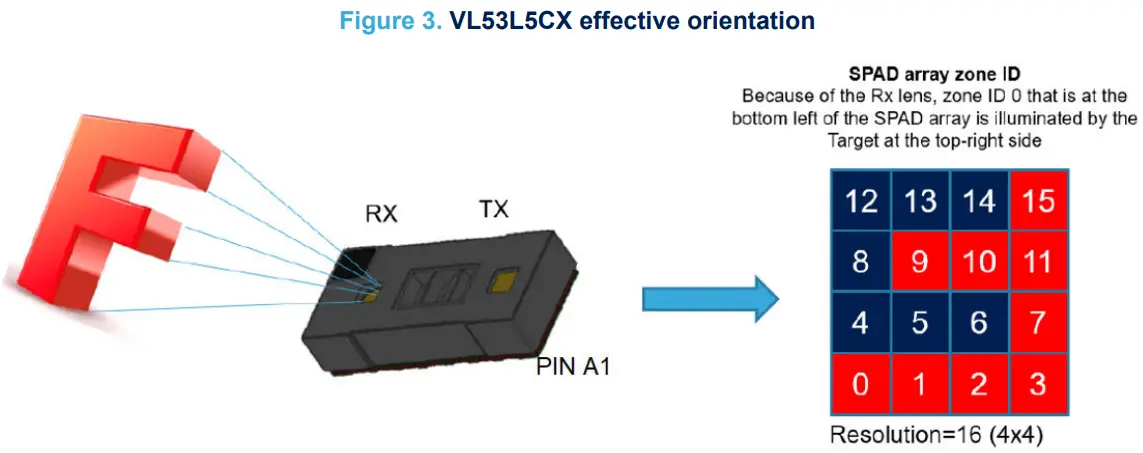
Ефективна ориентација
Модулот вклучува леќа над отворот Rx, кој ја превртува (хоризонтално и вертикално) снимената слика на целта. Следствено, зоната идентификувана како зона 0, во долниот лев дел од низата SPAD, е осветлена со цел лоцирана во горниот десен дел од сцената.
Шемати и I²C конфигурација
Комуникацијата помеѓу драјверот и фирмверот се управува со I²C, со можност за работа до 1 MHz. Имплементацијата бара повлекување на линиите SCL и SDA. Погледнете го листот со податоци VL53L5CX за повеќе информации.
Уредот VL53L5CX има стандардна I²C адреса од 0x52. Сепак, можно е да се смени стандардната адреса за да се избегнат конфликти со други уреди или да се олесни додавањето на повеќе VL53L5CX модули во системот за поголем систем FoV. Адресата I²C може да се смени со помош на функцијата vl53l5cx_set_i2c_address().
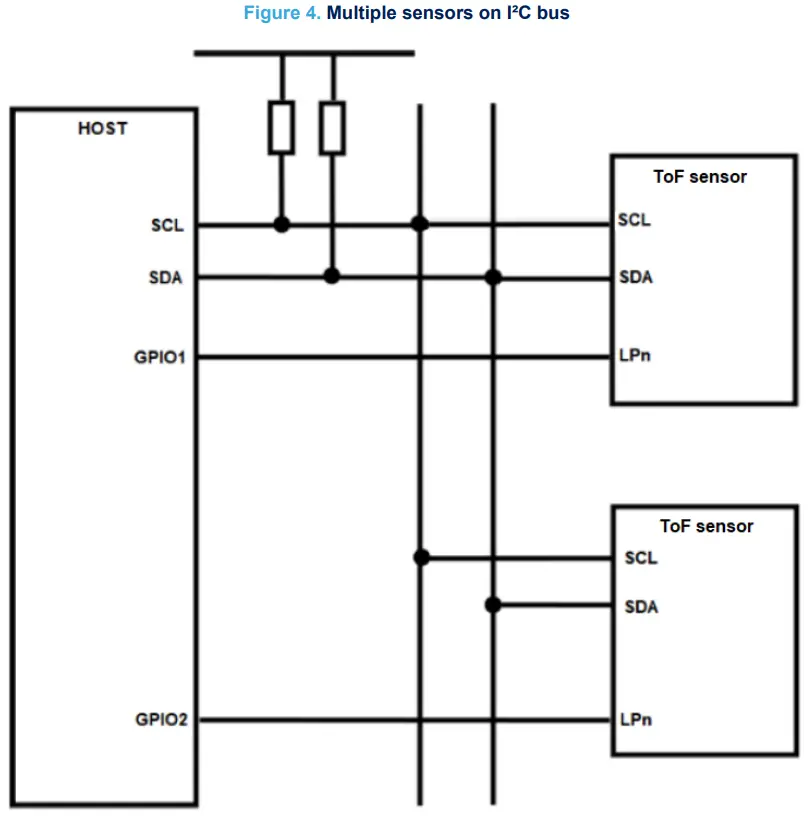
За да дозволите уредот да ја менува неговата I²C адреса без да влијае на другите во магистралата I²C, важно е да се оневозможи I²C комуникацијата на уредите што не се менуваат. Постапката е следна:
- Вклучете го системот нормално.
- Повлечете го LPn пинот на уредот на кој нема да му се смени адресата.
- Повлечете го LPn пинот на уредот на кој е сменета I²C адресата.
- Програмирајте ја адресата I²C на уредот користејќи ја функцијата set_i2c_address().
- Повлечете го LPn пинот на уредот што не се репрограмира.
Сите уреди сега треба да бидат достапни во автобусот I²C. Повторете ги горните чекори за сите уреди VL53L5CX во системот за кои е потребна нова I²C адреса.
Содржина на пакетот и проток на податоци
Архитектура и содржина на драјвери
Пакетот VL53L5CX ULD е составен од четири папки. Возачот се наоѓа во папката / VL53L5CX_ULD_API.
Возачот е составен од задолжителни и опционални fileс. Изборен files се plugins се користи за проширување на карактеристиките на ULD.
Секој додаток започнува со зборот „vl53l5cx_plugin“ (на пр. vl53l5cx_plugin_xtalk.h). Доколку корисникот не го сака предложеното plugins, тие можат да се отстранат без да влијаат на другите карактеристики на возачот. Следната слика го претставува задолжителното files и опционалниот plugins.
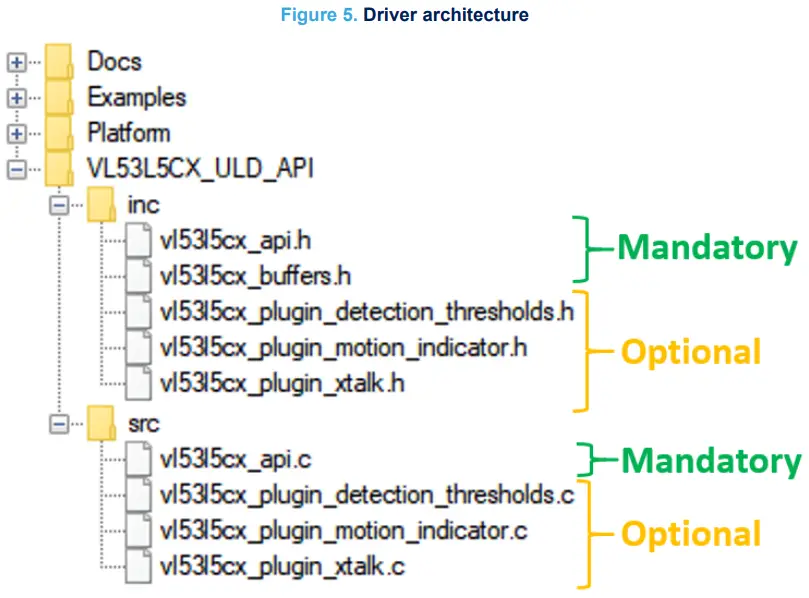
Корисникот исто така треба да имплементира два fileсе наоѓа во папката /Platform. Предложената платформа е празна школка и мора да биде исполнета со посебни функции.
Забелешка: Платформа.ч file содржи задолжителни макроа за користење на ULD. Сите file содржината е задолжителна за правилно користење на ULD.
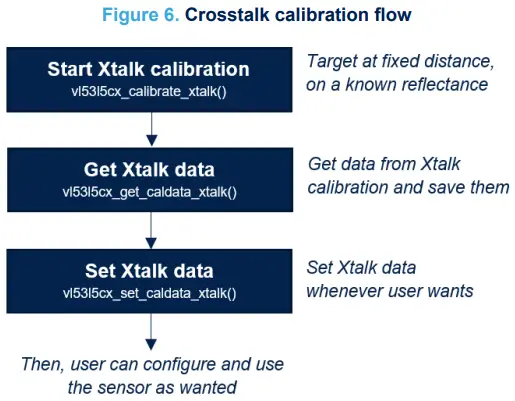
Тек на калибрација
Преслушувањето (Xtalk) се дефинира како количина на сигнал примен на низата SPAD, што се должи на рефлексијата на светлината VCSEL во заштитниот прозорец (стаклото за покривање) додаден на врвот на модулот. Модулот VL53L5CX е самокалибриран и може да се користи без дополнителна калибрација.
Може да биде потребна калибрација на Crosstalk ако модулот е заштитен со капак стакло. VL53L5CX е имун на вкрстување над 60 cm благодарение на хистограмскиот алгоритам. Меѓутоа, на кратки растојанија под 60 cm, Xtalk може да биде поголем од вистинскиот вратен сигнал. Ова дава лажно читање на целта или прави целите да изгледаат поблиску отколку што навистина се. Сите функции за калибрација на разговорот се вклучени во приклучокот Xtalk (опционално). Корисникот треба да го користи file „vl53l5cx_plugin_xtalk“.
Преслушувањето може да се калибрира еднаш, а податоците може да се зачуваат за да може повторно да се користат подоцна. Потребна е цел на фиксно растојание, со позната рефлексија. Минималното потребно растојание е 600 mm, а целта мора да го покрие целиот FoV. Во зависност од поставувањето, корисникот може да ги менува поставките за да ја прилагоди калибрацијата на разговорот, како што е предложено во следната табела.
Табела 1. Достапни поставки за калибрација
| Поставување | мин | Предложено од STMicroelectronics | Макс |
| Растојание [mm] | 600 | 600 | 3000 |
| Број на сampлес | 1 | 4 | 16 |
| Рефлексија [%] | 1 | 3 | 99 |
Забелешка: Зголемување на бројот на сamples ја зголемува точноста, но го зголемува и времето за калибрација. Времето во однос на бројот на сamples е линеарен, а вредностите го следат приближниот истек на време:
- 1 сample ≈ 1 секунда
- 4 сampпомалку ≈ 2.5 секунди
- 16 сampпомалку ≈ 8.5 секунди
Калибрацијата се врши со помош на функцијата vl53l5cx_calibrate_xtalk(). Оваа функција може да се користи во секое време. Сепак, прво мора да се иницијализира сензорот. Следната слика го претставува текот на калибрацијата на вкрстувањето.
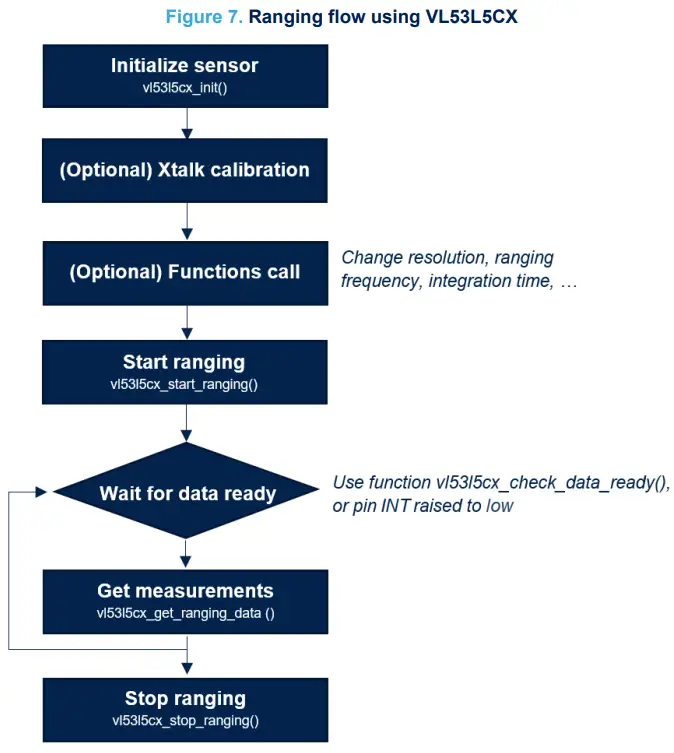
Се движат проток
Следната слика го претставува опсегот на проток што се користи за да се добијат мерења. Калибрацијата на Xtalk и изборните повици на функции мора да се користат пред да се започне со сесијата за опсег. Функциите get/set не може да се користат за време на сесија со опсег, а програмирањето „on-the-fly“ не е поддржано.
Достапни карактеристики
VL53L5CX ULD API вклучува неколку функции, кои му овозможуваат на корисникот да го подеси сензорот, во зависност од случајот на употреба. Сите функции достапни за возачот се опишани во следните делови.
Иницијализација
Мора да се изврши иницијализација пред да се користи сензорот VL53L5CX. Оваа операција бара од корисникот да:
- Вклучете го сензорот (VDDIO, AVDD, LPn пиновите поставени на High и пиновите I2C_RST поставени на 0)
- Повикајте ја функцијата vl53l5cx_init(). Функцијата го копира фирмверот (~84 Kbytes) на модулот. Ова се прави со вчитување на кодот преку интерфејсот I²C и изведување рутина за подигање за да се заврши иницијализацијата.
Управување со ресетирање на сензорот
За да го ресетирате уредот, треба да ги вклучите следните пинови:
- Поставете ги пиновите VDDIO, AVDD и LPn пиновите на ниско ниво.
- Почекајте 10 ms.
- Поставете ги пиновите VDDIO, AVDD и LPn пиновите на високо.
Забелешка: Вклучувањето само на пинот I2C_RST ја ресетира I²C комуникацијата.
Резолуција
Резолуцијата одговара на бројот на достапни зони. Сензорот VL53L5CX има две можни резолуции: 4×4 (16 зони) и 8×8 (64 зони). Стандардно, сензорот е програмиран во 4×4.
Функцијата vl53l5cx_set_resolution() му овозможува на корисникот да ја промени резолуцијата. Бидејќи фреквенцијата на опсег зависи од резолуцијата, оваа функција мора да се користи пред да се ажурира фреквенцијата на опсегот. Освен тоа, менувањето на резолуцијата ја зголемува и големината на сообраќајот на автобусот I²C кога се читаат резултатите.
Фреквенција на опсег
Фреквенцијата на опсег може да се користи за промена на фреквенцијата на мерење. Бидејќи максималната фреквенција е различна помеѓу резолуциите 4×4 и 8×8, оваа функција треба да се користи по изборот на резолуција. Минималните и максималните дозволени вредности се наведени во следната табела.
Табела 2. Минимум и максимален опсег на фреквенции
| Резолуција | Минимална фреквенција на опсег [Hz] | Максимална фреквенција на опсег [Hz] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
Фреквенцијата на опсег може да се ажурира со помош на функцијата vl53l5cx_set_ranging_frequency_hz(). Стандардно, фреквенцијата на опсег е поставена на 1 Hz.
Режим на опсег
Режимот на опсег му овозможува на корисникот да избира помеѓу опсег со високи перформанси или мала потрошувачка на енергија. Предложени се два начини:
- Континуирано: Уредот континуирано зграпчува рамки со опсег на фреквенција дефинирана од корисникот. VCSEL е овозможен за време на целото опсег, така што максималното растојание на опсег и имунитетот на околината се подобри. Овој режим се препорачува за брзи мерења или високи перформанси.
- Автономна: Ова е стандардниот режим. Уредот континуирано зграпчува рамки со опсег на фреквенција дефинирана од корисникот. VCSEL е овозможен во период дефиниран од корисникот, користејќи ја функцијата vl53l5cx_set_integration_time_ms(). Бидејќи VCSEL не е секогаш вклучен, потрошувачката на енергија се намалува. Придобивките се поочигледни со намалена фреквенција на опсег. Овој режим се препорачува за апликации со мала моќност.
Режимот на опсег може да се промени со помош на функцијата vl53l5cx_set_ranging_mode().
Време на интеграција
Времето на интеграција е карактеристика достапна само со користење на режимот за автономно опсег (видете во Дел 4.5: Режим на опсег). Тоа му овозможува на корисникот да го промени времето додека VCSEL е овозможен. Промената на времето на интеграција ако режимот на опсег е поставен на континуирано нема ефект. Стандардното време за интеграција е поставено на 5 ms.
Ефектот на времето на интеграција е различен за резолуциите 4×4 и 8×8. Резолуцијата 4×4 е составена од едно време на интеграција, а резолуцијата 8×8 е составена од четири времиња на интеграција. Следните бројки ја претставуваат емисијата на VCSEL за двете резолуции.
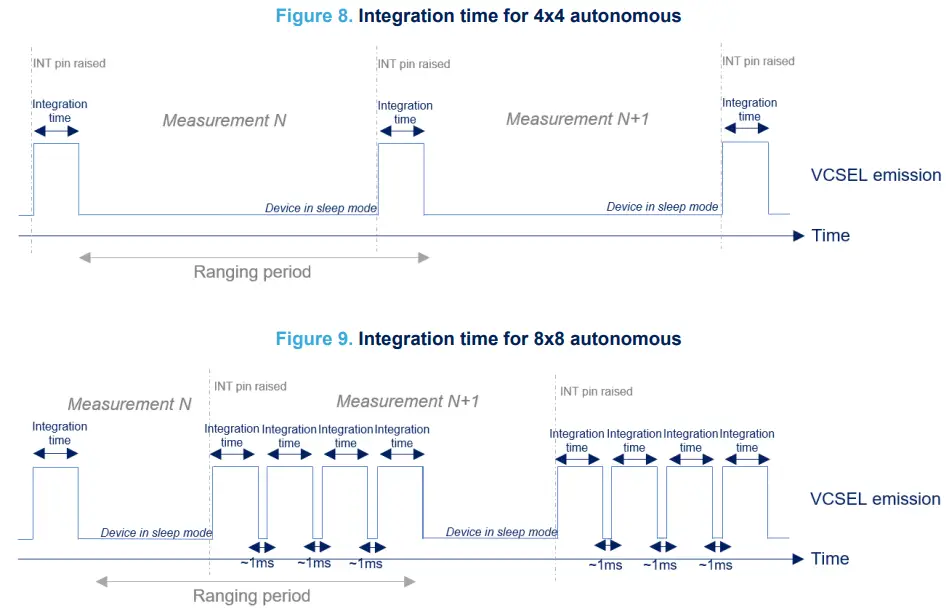
Збирот на сите времиња на интеграција + 1 ms над глава мора да биде помал од периодот на мерење. Во спротивно, периодот на опсег автоматски се зголемува.
Режими на напојување
Режимите за напојување може да се користат за да се намали потрошувачката на енергија кога уредот не се користи. VL53L5CX може да работи во еден од следниве режими на напојување:
- Будење: Уредот е поставен на HP во мирување (голема моќност), чекајќи инструкции.
- Sleep: Уредот е поставен во LP мирување (ниска моќност), состојба со мала моќност. Уредот не може да се користи додека не се постави во режим на будење.
Овој режим ги задржува фирмверот и конфигурацијата.
Режимот за напојување може да се промени со помош на функцијата vl53l5cx_set_power_mode(). Стандардниот режим е будење.
Забелешка: Ако корисникот сака да го промени режимот на напојување, уредот не смее да биде во состојба на опсег.
Острилка
Сигналот што се враќа од целта не е чист пулс со остри рабови. Рабовите се наклонети и може да влијаат на растојанијата пријавени во соседните зони. Острилката се користи за отстранување на дел или на целиот сигнал предизвикан од отсјајот на превезот.
ПоранешниотampПрикажаното на следната слика претставува блиска цел на 100 mm центриран во FoV, и друга цел, позади на 500 mm. Во зависност од вредноста на острилото, блиската цел може да се појави во повеќе зони од вистинската.
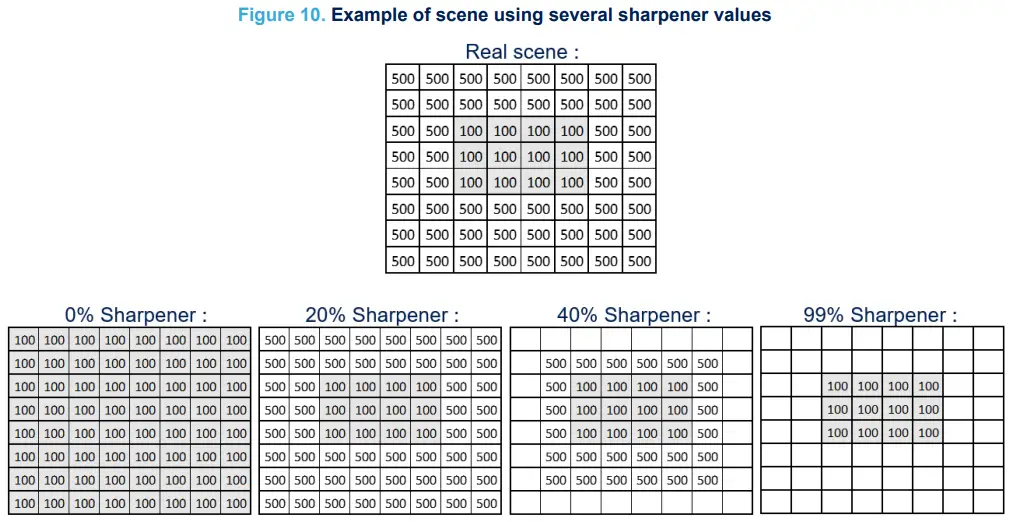
Остричот може да се смени со помош на функцијата vl53l5cx_set_sharpener_percent(). Дозволените вредности се помеѓу 0% и 99%. Стандардната вредност е 5%.
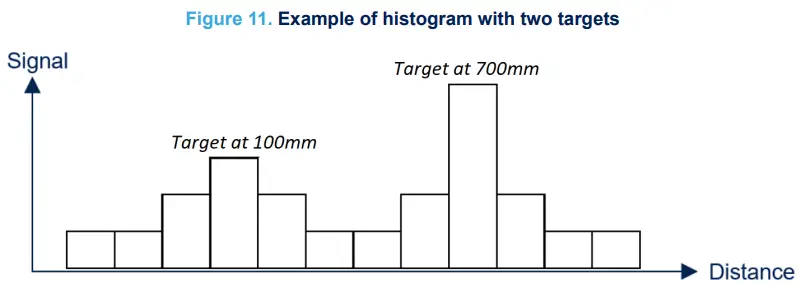
Целна нарачка
VL53L5CX може да измери неколку цели по зона. Благодарение на обработката на хистограмот, домаќинот може да го избере редоследот на пријавени цели. Постојат две опции:
- Најблиску: Најблиската цел е првата пријавена
- Најсилна: Најсилната цел е првата пријавена
Целниот редослед може да се смени со помош на функцијата vl53l5cx_set_target_order(). Стандардниот редослед е Најсилно.
Поранешниотample на следната слика претставува откривање на две цели. Еден од 100 mm со мала рефлексија и еден од 700 mm со висока рефлексија.
Повеќе цели по зона
VL53L5CX може да измери до четири цели по зона. Корисникот може да го конфигурира бројот на цели вратени од сензорот.
Забелешка: Минималното растојание помеѓу две мети што треба да се откријат е 600 mm.
Изборот не е возможен од возачот; тоа треба да се направи во „Platform.h“ file. Макрото VL53L5CX_NB_ TARGET_PER_ZONE треба да се постави на вредност помеѓу 1 и 4. Целниот редослед опишан во Дел 4.9: Целниот ред директно влијае на редоследот на откриената цел. Стандардно, сензорот дава само максимум една цел по зона.
Забелешка: Зголемениот број на цели по зона ја зголемува потребната големина на RAM меморијата
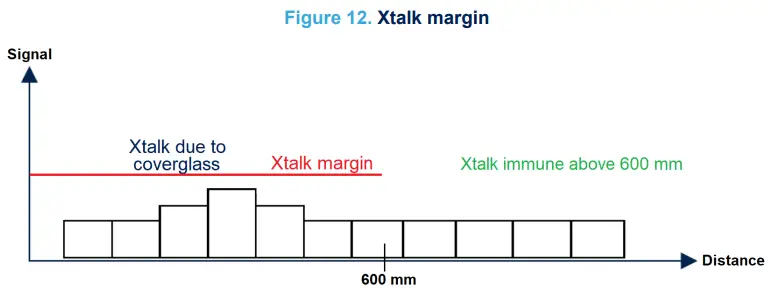
Маргина на Xtalk
Маргината на Xtalk е дополнителна функција достапна само со помош на приклучокот Xtalk. .c и .f fileТреба да се користи „vl53l5cx_plugin_xtalk“.
Маргината се користи за менување на прагот за откривање кога на горниот дел од сензорот има капак стакло. Прагот може да се зголеми за да се осигури дека стаклото на капакот никогаш нема да биде откриено, откако ќе ги поставите податоците за калибрација на вкрстениот разговор. За прampтака, корисникот може да изврши калибрација на разговор на еден уред и повторно да ги користи истите податоци за калибрација за сите други уреди. Маргината на Xtalk може да се користи за прилагодување на корекција на разговорот. Сликата подолу ја претставува маргината на Xtalk.
Прагови за откривање
Покрај редовните можности за опсег, сензорот може да се програмира да детектира објект под одредени однапред дефинирани критериуми. Оваа функција е достапна со помош на приклучокот „прагови за откривање“, што е опција што стандардно не е вклучена во API. На fileТреба да се користат s наречени „vl53l5cx_plugin_detection_thresholds“.
Функцијата може да се користи за активирање на прекин на пинот A3 (INT) кога се исполнети условите дефинирани од корисникот. Постојат три можни конфигурации:
- Резолуција 4×4: користење на еден праг по зона (вкупно 16 прагови)
- Резолуција 4×4: користење на два прагови по зона (вкупно 32 прагови)
- Резолуција 8×8: користење на еден праг по зона (вкупно 64 прагови)
Без оглед на употребената конфигурација, постапката за креирање прагови и големината на RAM меморијата се исти. За секоја комбинација на прагови, треба да се пополнат неколку полиња: - Ид на зона: id на избраната зона (видете во Дел 2.2: Ефективна ориентација)
- Мерење: мерење за фаќање (растојание, сигнал, број на SPAD, ...)
- Тип: мерни прозорци (во прозорци, надвор од прозорци, под низок праг, ...)
- Низок праг: корисник со низок праг за активирање. Корисникот не треба да го поставува форматот, со него автоматски се ракува API.
- Висок праг: корисник со висок праг за активирање. Корисникот не треба да го поставува форматот; со него автоматски се ракува API.
- Математичка операција: се користи само за 4×4 – 2 комбинации на прагови по зона. Корисникот може да постави комбинација користејќи неколку прагови во една зона.
Индикатор за движење
Сензорот VL53L5CX има вградена карактеристика на фирмверот што овозможува откривање движење во сцена. Индикаторот за движење се пресметува помеѓу секвенцијални рамки. Оваа опција е достапна со помош на plugin'vl53l5cx_plugin_motion_indicator'.
Индикаторот за движење се иницијализира со помош на функцијата vl53l5cx_motion_indicator_init(). За да ја промените резолуцијата на сензорот, ажурирајте ја резолуцијата на индикаторот за движење користејќи ја намената функција: vl53l5cx_motion_indicator_set_resolution().
Корисникот исто така може да ги промени минималните и максималните растојанија за откривање на движење. Разликата помеѓу минималните и максималните растојанија не може да биде поголема од 1500 mm. Стандардно, растојанијата се иницијализираат со вредности помеѓу 400 mm и 1500 mm.
Резултатите се зачувани во полето „motion_indicator“. Во ова поле, низата „движење“ дава вредност што го содржи интензитетот на движење по зона. Високата вредност укажува на голема варијација на движењето помеѓу кадрите. Типично движење дава вредност помеѓу 100 и 500. Оваа чувствителност зависи од времето на интеграција, целното растојание и рефлексијата на целта.
Идеална комбинација за апликации со мала моќност е употребата на индикаторот за движење со режим на автономно опсег и прагови за откривање програмирани на движење. Ова овозможува откривање на варијации на движење во FoV со минимална потрошувачка на енергија.
Периодична температурна компензација
Работата на опсегот е под влијание на температурните варијации. Сензорот VL53L5CX вградува температурна компензација што се калибрира еднаш кога започнува преносот. Меѓутоа, ако температурата еволуира, компензацијата може да не биде усогласена со новата температура. За да се избегне овој проблем, клиентот може да изврши периодична компензација на температурата со користење на автоматско VHV. Периодичната калибрација на температурата трае неколку милисекунди. Корисникот може да го дефинира периодот.
За да ја искористи оваа функција, клиентот треба:
• Повикајте ја функцијата vl53l5cx_set_VHV_repeat_count().
• Потоа, како аргумент дајте го бројот на рамки помеѓу секоја нова калибрација.
Ако аргументот е 0, компензацијата е оневозможена.
Се движат резултати
Достапни податоци
За време на опсежните активности може да се добие обемна листа на податоци за целта и околината. Следната табела ги опишува параметрите достапни за корисникот.
Табела 3. Достапен излез со помош на сензор VL53L5CX
| Елемент | Nb бајти (RAM) | Единица | Опис |
| Амбиент по SPAD | 256 | Kcps/SPAD | Мерење на амбиентална брзина извршено на SPAD низата, без активна емисија на фотони, за мерење на брзината на амбиенталниот сигнал поради бучава. |
| Број на откриени цели | 64 | Никој | Број на откриени цели во тековната зона. Оваа вредност треба да биде првата што ќе се провери за да се знае валидноста на мерењето. |
| Број на овозможени SPAD-и | 256 | Никој | Број на SPAD-и овозможени за тековното мерење. Далечната или ниска рефлектирачка цел активира повеќе SPAD-и. |
| Сигнал по SPAD | 256 x nb цели програмирани | Kcps/SPAD | Количество на фотони измерено за време на пулсот VCSEL. |
| Сигма на опсег | 128 x nb цели програмирани | Милиметар | Сигма проценувач за шумот во пријавеното целно растојание. |
| Растојание | 128 x nb цели програмирани | Милиметар | Целното растојание |
| Статус на целта | 64 x nb цели програмирани | Никој | Валидност на мерењата. Види Дел 5.5: Резултати толкување за повеќе информации. |
| Рефлексија | 64 x бројни цели програмирани | проценти | Проценета целна рефлексија во проценти |
| Индикатор за движење | 140 | Никој | Структура која ги содржи резултатите од индикаторот за движење. Полето „движење“ го содржи интензитетот на движењето. |
Забелешка: За неколку елементи (сигнал по spad, сигма, ...) пристапот до податоците е различен ако корисникот програмирал повеќе од една цел по зона (види Дел 4.10: Повеќе цели по зона). Видете прampле кодови за повеќе информации.
Приспособете го изборот на излез
Стандардно, сите VL53L5CX излези се овозможени. Доколку е потребно, корисникот може да оневозможи некои излези од сензорот.
Оневозможувањето на мерењата не е достапно на возачот; мора да се изврши во „Platform.h“ file. Корисникот може да ги прогласи следните макроа за да ги оневозможи излезите:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
Следствено, полињата не се декларирани во структурата на резултатите и податоците не се пренесуваат на домаќинот. Големината на RAM и I²C се намалени.
За да се обезбеди конзистентност на податоците, ST секогаш препорачува да се овозможат „бројот на откриени цели“ и „статус на целта“. Ова ги филтрира мерењата во зависност од статусот на целта (видете во Дел 5.5: Толкување на резултатите).
Добивање разновидни резултати
За време на сесијата за опсег, постојат два начини да се знае дали се достапни нови податоци за опсег:
- Режим на гласање: Континуирано ја користи функцијата vl53l5cx_check_data_ready(). Открива нов број на преноси вратени од сензорот.
- Режим на прекин: Чека да се појави прекин на пинот A3 (GPIO1). Прекинот автоматски се брише по ~100 μs.
Кога новите податоци се подготвени, резултатите може да се читаат со помош на функцијата vl53l5cx_get_ranging_data(). Враќа ажурирана структура која ги содржи сите избрани излези. Бидејќи уредот е асинхрон, нема прекин за бришење за да се продолжи сесијата на опсег.
Оваа функција е достапна и за режими за континуирано и за автономно опсег.
Користење на необработен формат на фирмверот
По префрлањето на опсегот на податоци преку I²C, доаѓа до конверзија помеѓу форматот на фирмверот и форматот на домаќинот. Оваа операција обично се изведува за да има растојание во милиметри како стандарден излез на сензорот. Ако корисникот сака да го користи форматот на фирмверот, следната макро мора да биде дефинирана во платформата file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
Толкување на резултатите
Податоците вратени од VL53L5CX може да се филтрираат за да се земе предвид статусот на целта. Статусот ја означува валидноста на мерењето. Целосната статусна листа е опишана во следната табела.
Табела 4. Список на достапни статус на целта
| Статус на целта | Опис |
| 0 | Податоците за опсегот не се ажурираат |
| 1 | Брзината на сигналот е премногу ниска на SPAD низата |
| 2 | Целна фаза |
| 3 | Сигма проценувачот е превисок |
| 4 | Конзистентноста на целта не успеа |
| 5 | Опсегот важи |
| 6 | Неизвршено обвиткување (обично првиот опсег) |
| 7 | Конзистентноста на стапката не успеа |
| 8 | Стапката на сигнал е премногу ниска за тековната цел |
| 9 | Опсегот важи со голем пулс (може да се должи на споена цел) |
| 10 | Опсегот важи, но не е откриена цел на претходниот опсег |
| 11 | Конзистентноста на мерењето не успеа |
| 12 | Целта е заматена од друга, поради острилка |
| 13 | Откриена цел, но неконзистентни податоци. Често се случува за секундарни цели. |
| 255 | Не е откриена цел (само ако е овозможен бројот на откриени цели) |
За да има конзистентни податоци, корисникот треба да го филтрира неважечкиот статус на целта. За да се даде оцена на доверба, целта со статус 5 се смета за 100% валидна. Статусот од 6 или 9 може да се смета со вредност на доверба од 50%. Сите други статуси се под нивото на доверба од 50%.
Грешки на возачот
Кога ќе се појави грешка при користење на сензорот VL53L5CX, возачот враќа специфична грешка. Следната табела ги наведува можните грешки.
Табела 5. Список на грешки достапни со користење на драјверот
| Статус на целта | Опис |
| 0 | Нема грешка |
|
127 |
Корисникот програмирал погрешна поставка
(непозната резолуција, превисока фреквенција на опсег, ...) |
| 255 | Голема грешка. Обично грешка на истек на време, поради грешка I²C. |
| други | Комбинација на повеќекратни грешки опишани погоре |
Забелешка: Домаќинот може да имплементира повеќе кодови за грешка со користење на платформата files.
Историја на ревизии
Табела 6. Историја на ревизија на документи
| Датум | Верзија | Промени |
| 21-јуни-2021 | 1 | Почетно ослободување |
| 30-авг-2021 година | 2 | Додадено Дел 5.4: Користење на необработен формат на фирмверот
Додаден е нов статус на целта 13 инчи Табела 4. Список на достапни статус на целта |
| 05-сеп-2022 година | 3 | Додадена е белешка за минималното минимално растојание помеѓу целите до Дел 4.10: Повеќе цели по зона |
| 10-авг-2023 година | 4 | Изменето Слика 11. Прampле од хистограмот со две цели |
| 21-февруари 2024 година | 5 | Додадено е VHV (многу висок волуменtagд) до Дел 1: Акроними и кратенки. Додадено Дел 4.14: Периодична температурна компензација |
ВАЖНО НАПОМЕНА – ПРОЧИТАЈТЕ ВНИМАТЕЛНО
STMicroelectronics NV и нејзините подружници („ST“) го задржуваат правото да прават промени, корекции, подобрувања, модификации и подобрувања на производите на ST и/или на овој документ во секое време без најава. Купувачите треба да ги добијат најновите релевантни информации за производите на ST пред да направат нарачки. Производите на ST се продаваат во согласност со одредбите и условите за продажба на ST кои се на сила во моментот на потврдата на нарачката.
Набавувачите се единствено одговорни за изборот, изборот и употребата на производите на ST и ST не презема никаква одговорност за помош при апликација или дизајнирање на производите на купувачите.
Ниту една лиценца, експлицитна или имплицитна, за кое било право на интелектуална сопственост не е дадена од страна на ST овде.
Препродажбата на производите на ST со одредби различни од информациите наведени овде ќе ја поништи секоја гаранција дадена од ST за таков производ.
ST и логото ST се заштитни знаци на ST. За дополнителни информации за заштитните марки ST, погледнете во www.st.com/trademarks. Сите други имиња на производи или услуги се сопственост на нивните соодветни сопственици.
Информациите во овој документ ги заменуваат и заменуваат информациите претходно доставени во која било претходна верзија на овој документ.
© 2024 STMicroelectronics – Сите права се задржани

Документи / ресурси
 |
STMicroelectronics VL53L5CX Повеќезонски сензор за опсег на време на летот [pdf] Упатство за користење VL53L5CX повеќезонски сензор за опсег на летот, VL53L5CX, повеќезонски сензор за време на опсег на летот, сензор за време на опсег на летот, сензор за опсег на летот, сензор за опсег, сензор |



