![]() TPD4204F DC 300V влезен BLDC мотор без сензорско коло за контрола
TPD4204F DC 300V влезен BLDC мотор без сензорско коло за контрола
Упатство за употреба
Вовед
Овој референтен водич (во натамошниот текст „овој водич“) ги објаснува спецификациите и чекорите на работа на контролното коло без сензор на моторот BLDC со влез DC 300 V (во натамошниот текст „овој референтен дизајн“).
Вентилаторот на внатрешната единица на клима уредите работи со помош на мотор без четкички, генерално управуван на ниво DC 300 V. Претходно, моторите беа придвижувани главно со напојување со квадратни бранови со помош на сензори Хол, итн., но во последниве години, како одговор на барањата за пониски трошоци на системот, поголема ефикасност и потивки мотори, моторите се придвижуваа со синусоидална енергија без употреба на Хол сензори и со векторска контрола.
Во овој референтен дизајн, микроконтролерот TMPM374FWUG се користи за контролирање на моторот и за спроведување на векторска контрола без сензор.
За возење на моторот се користи интелигентен уред за напојување кој се состои од прекинувач за трифазен инвертер и двигател на портата во компактен пакет. Овој референтен дизајн (RD180- 3) користи TPD4204F (вграден тип MOSFET, отпорен волtage од 600 V, максимална излезна струја од 2.5 А и пакет SSOP30). Овој уред помага да се постигне високо-ефикасен мотор со компактен простор за монтирање на плоча.
Спецификации
Табелата 2.1 ги наведува главните спецификации на овој референтен дизајн.
Табела 2.1 Спецификации на контролното коло на BLDC мотор без сензор за DC 300 V
| Ставка | Спецификации |
| Влез за моќност на моторот | DC 120 V до 340 V |
| Контрола на влезот на енергија | DC 15 V, DC 5 V |
| Максимална струја на погон на моторот (по фаза) | 2.5 А |
| Моторни погонски систем | Векторска контрола без сензор (контрола на брзина) |
| Фреквенција на префрлување | 15.625 kHz (може да се менува со софтвер) |
| MC() Контролен метод | Единечна контрола на MCU или надворешна контрола на MCU |
| Систем за ладење | Природно воздушно ладење |
| Заштитна функција | Прекумерна струја на влезната моќност на моторот (10 А од осигурувачот) Прекумерна струја на излезот на моторот (приближно 2.9 А секоја фаза) |
| Големина на табла (Вклучувајќи го и делот за дополнителна табла) |
130 x 85 x 53.4 mm |
| I/O интерфејс (Поставен на дополнителна табла) |
Црвена ЛЕД за приказ на статус x 3 DIP прекинувачи за поставување статус x 4 Потенциометар за подесување на брзина x 1 SWD влез/излез x 1 |
2.1. Блок-дијаграми на кола
Сл. 2.1 го прикажува блок дијаграмот на овој референтен дизајн.

Сл. 2.1 Блок-дијаграм на контролното коло на BLDC мотор без сензор за влез на DC
2.2. Надворешен View и Распоред на компоненти
Сл. 2.2 и сл. 2.3 го прикажуваат надворешниот изглед на овој референтен дизајн, а сл. 2.4 го прикажува распоредот на главните компоненти.
 Сл. 2.2 DC 300 V Влез BLDC мотор без сензор за контролно коло предна плоча View (За RD179-3)
Сл. 2.2 DC 300 V Влез BLDC мотор без сензор за контролно коло предна плоча View (За RD179-3)

Сл. 2.3 DC 300 V Влез BLDC мотор без сензор Контролно коло Надворешно view на ПХБ (за RD179-3)

Дијаграм на кола, сметки за материјал и дијаграм на моделот на ПХБ
3.1. Дијаграм на кола
Видете на следново file:
RD179-3 (опремен со TPD4204F): RD179-SCHEMATIC3-xx.pdf (xx е бројот на ревизија)
3.2. Список на компоненти
Видете на следново file:
RD179-3 (опремен со TPD4204F): RD179-BOM3-xx.pdf (xx е бројот на ревизија)
3.3. Дијаграм за модел на ПХБ
Сл. 3.1 ги прикажува дијаграмите на шемата на ПХБ на овој референтен дизајн.
Исто така, погледнете го следново file:
RD179-3 (опремен со TPD4204F): RD179-LAYER3-xx.pdf (xx е бројот на ревизија)

Опис на работата на колото
4.1. Име и функција на компонентите
4.1.1. Скокач за лемење за поставување метод на шант (SJP1, SJP2, SJP3, SJP4)
За да го префрлите методот за откривање струја, поставете четири џемпери за лемење како што е опишано подолу.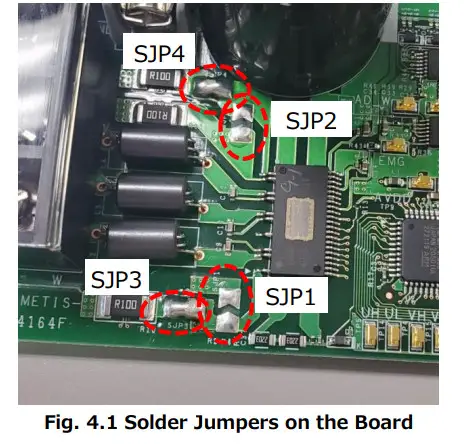
Табела 4.1 Поставки за скокач за лемење
| Систем за откривање струја | SJP1 | SJP2 | SJP3 | SJP4 |
| 3-шант систем | Отвори | Отвори | Кратко | Кратко |
| 1-шант систем | Кратко | Кратко | Отвори | Отвори |
4.1.2. Влезен конектор за напојување на моторот (J1)
Се користи за влезна еднонасочна струја за придвижување на моторот.
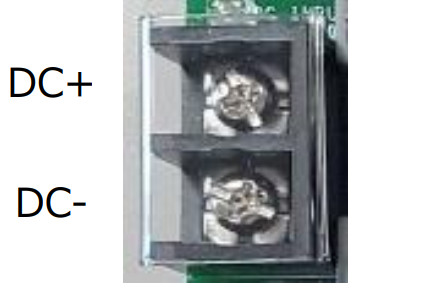 Сл. 4.2 Влезен приклучок за моќност на моторот на плочата (J1)
Сл. 4.2 Влезен приклучок за моќност на моторот на плочата (J1)
4.1.3. Конектор за мотор (J2)
Се користи за поврзување на 3-фазен BLDC мотор.
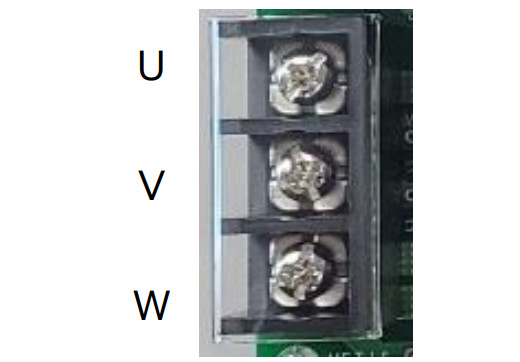 Сл. 4.3 Приклучок за мотор на плочата (J2)
Сл. 4.3 Приклучок за мотор на плочата (J2)
4.1.4. Контролни конектори за влез за напојување (J3, J10)
Се користи за снабдување на Влезна моќност за контрола. Конекторот е приклучок од типот на приклучок (внатрешен позитивен поларитет), така што може да се испорачува со помош на AC адаптер, итн. J3 е за влез од 15 V и се користи за ракување со интелигентен уред за напојување (TPD4204F). А, J10 е за влез од 5 V и се користи како напојување за MCU, периферен IC, итн. Бидејќи двата конектори се од ист тип, внимавајте да не ги поврзете погрешно.
 Сл. 4.4 Контролирајте ги влезните конектори за напојување (J3, J10) на плочата
Сл. 4.4 Контролирајте ги влезните конектори за напојување (J3, J10) на плочата
4.1.5. Прекинувачи и LED диоди (S_SW1~4, LED1~3, LEDP1~2)
Прекинувачите и LED диодите работат на следниов начин.
S_SW1, S_SW2, S_SW3, S_SW4, LED1, LED2 и LED3 се поврзани со GPIO пиновите на MCU и се контролирани со софтвер.
 Сл. 4.5 Прекинувачи и LED диоди на плочата
Сл. 4.5 Прекинувачи и LED диоди на плочата
Табела 4.2 Спецификации на прекинувач и LED
| Компонента | Функција | Забелешка |
| S SW1 | (не се користи) | |
| S SW2 | Метод на контрола на MCU | Вклучено: надворешна контрола на MCU, Исклучена Единечна контрола на MCU (Треба да биде поставена на Исклучено во овој референтен дизајн.) |
| S SW3 | Насока на ротација на моторот | Вклучено: CW (во насока на стрелките на часовникот), Исклучено: CCW (спротивно од стрелките на часовникот) |
| S SW4 | (Не се користи) | |
| LED1 | Индикатор за грешка | бр Грешка: Исклучено Грешка: вклучено или трепка |
| LED2 | Векторски индикатор за мотор | VE Прекин во тек: Вклучено |
| LED3 | Индикатор за комуникација | Комуницирање: вклучено Комуникацијата прекина поради грешка: трепка на секои 0.5 секунди |
| LEDP1 | Индикатор за вклучување на моќноста на моторот | Кога напојувањето на моторот е вклучено: вклучено (жолто) LEDP1, исто така, вклучено додека кондензаторот е наполнет. Внимавајте да не ја допирате таблата додека е вклучена. |
| LEDP2 | Контролна моќност Индикатор за напојување на снабдување |
Контролна моќност (5 V) со напон: вклучено (зелено) |
4.1.6. Потенциометар (VR1)
Потенциометарот може да се користи за поставување на брзината на моторот (cHZ_MIN до 60 Hz опсег).
 Сл. 4.6 Потенциометар на одборот (VR1)
Сл. 4.6 Потенциометар на одборот (VR1)
Електрична аголна ротација
 Сл. 4.7 Врска помеѓу вредноста на подесувањето на потенциометарот и брзината на ротација
Сл. 4.7 Врска помеѓу вредноста на подесувањето на потенциометарот и брзината на ротација
4.1.7. Надворешен MCU конектор (J7)
Конектор за поврзување со надворешен (домаќин) MCU. Не се користи во овој референтен дизајн.
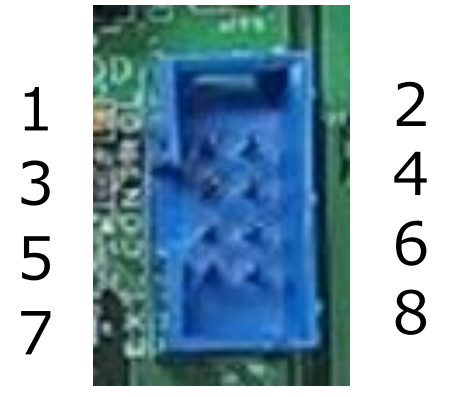 Сл. 4.8 Надворешен MCU конектор (J7)
Сл. 4.8 Надворешен MCU конектор (J7)
Табела 4.3 Спецификации на надворешниот MCU конектор
| Пин | Функција | Забелешка | |
| 1 | ДВД | Дигитално напојување (5 V) | |
| 2 | ДВС | Дигитално напојување (GND) | |
| 3 | UART RX | Прием на UART | |
| 4 | UART_TX | Пренос на UART | |
| 5 | GPIO врска | Резервирано (не користено) | Исто како S SW1 |
| 6 | GPIO врска | Контролен режим | Исто како S SW2 |
| 7 | РЕСЕТИРАЈ# | Ресетирајте го влезот | За да се ресетира MCU |
| 8 | GPIO врска | Резервирано (не користено) | GPIO врска |
4.1.8. Надворешен DAC конектор (J4)
Податоците што треба да се обработат во MCU се издаваат како сериски податоци. Со поврзување на надворешен DAC, податоците за обработка може да се проверат како бранова форма со помош на осцилоскоп, итн.
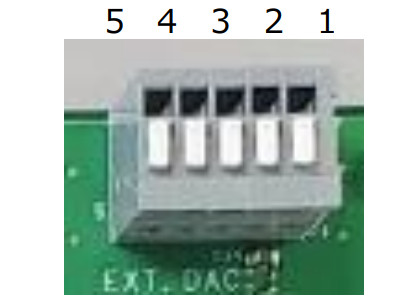 Сл. 4-9 Надворешен DAC конектор (J4)
Сл. 4-9 Надворешен DAC конектор (J4)
Табела 4.4 Спецификации на надворешен DAC конектор
| Пин | Функција | Забелешки | |
| 1 | ДВД | Излезна моќност од 5 V | |
| ГНД | ГНД | ||
| 3 | СИНИНЦИРАЈ | Сигнал за синхронизација на DAC | Користи GPIO |
| 4 | СДО | DAC податоци | Користи SIO |
| 5 | SCLK | DAC часовник | Користи SIO |
4.1.9. Конектор за дебагер (J5)
20-пински конектор за поврзување со сондата за емулатор/дебагер. Тој е во согласност со стандардот за конектор MIPI-20 и го поддржува само интерфејсот SWD.
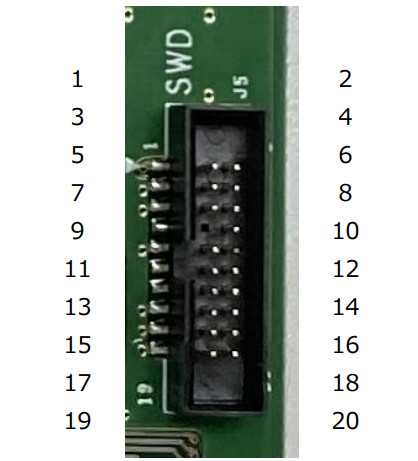 Сл. 4.10. Конектор за дебагер (J5)
Сл. 4.10. Конектор за дебагер (J5)
Табела 4.5 Спецификации на конекторот за дебагер
| Пин | Функција | Пин | Функција |
| 1 | VDD (5 V) | 2 | SWDIO |
| 3 | ГНД | 4 | SWCLK |
| 5 | ГНД | 6 | SWV |
| 7 | (нц) | 8 | (нц) |
| 9 | ГНД | 10 | РЕСЕТИРАЈ |
| 11 | (нц) | 12 | (нц) |
| 13 | (нц) | 14 | (нц) |
| 15 | ГНД | 16 | (нц) |
| 17 | ГНД | 18 | (нц) |
| 19 | ГНД | 20 | (нц) |
4.2. Проверка на операцијата
4.2.1. Подготовка
Поврзете 3-фазен BLDC мотор со конекторот на моторот (J2). Поврзете го напојувањето со еднонасочна струја со влезниот конектор за напојување на моторот (J1). Поставете го прекинувачот S_SW2 (метод на контрола на MCU) на плочата на Исклучено (единечна контрола на MCU). Вклучете го напојувањето по следниот редослед: контролна моќност (5 V) влезен конектор (J10) → контролна моќност (15 V) влезен конектор (J13) → влезен конектор за напојување на моторот (J1).
4.2.2. Метод на работа
Моторот е во запрена состојба кога потенциометарот (VR1) е во Min-позиција (0 Hz). Моторот може да се запали со подигање на поставката за потенциометар (VR1) од минималната позиција (0 Hz). Ако моторот е запрен кога потенциометарот не е во положбата MIN, сменете го VR1 во позиција Min еднаш. Додека е во запрена состојба, LED1, LED2 и LED3 се исклучени.
Откако ќе започне работата на моторот, брзината може да се менува со користење на VR1. Колку VR1 е поблиску до положбата Max (60 Hz), толку е поголема брзината на ротација. Колку е поблиску до позицијата Min, толку е помала брзината на ротација. Кога S_SW3 (насока на ротација) е вклучено, моторот се ротира во насока CW (во насока на стрелките на часовникот), а кога е Исклучено, моторот се ротира во насока CCW (против стрелките на часовникот).
4.2.3. Операција кога е откриена абнормалност
Ако се открие следнава грешка, системот влегува во ЕМГ (Итна) состојба, моторот запира и LED1 или трепка или се вклучува.
- Абнормален томtagд детекција: Кога е абнормален волtage се открива, LED1 трепка во циклуси од 250 ms.
- Откривање на абнормална струја: кога ќе се открие абнормална струја, LED1 трепка во циклус од 500 ms.
- Откривање на прекумерна струја на софтвер: кога прекумерна струја се открива со помош на софтверска обработка, LED1 трепка во циклуси од 1 s.
- Откривање на прекумерна струја на хардверот: кога ќе се открие прекумерна струја со помош на хардверската функција MCU, LED1 се вклучува.
ЕМГ статусот се откажува со спуштање на VR1 на позиција MIN.
4.3. Мерки на претпазливост за употреба
Обрнете посебно внимание на следново кога работите.
- Поставувањето на скокачот пред да се напојува мора да се потврди. Посебно мора да се провери поставката на скокачот за лемење со 3 шант/1 шант.
- Поларитетот на конекторите и терминалите мора да биде точен.
- На кондензаторот за измазнување на напојувањето на моторот му требаат приближно 10 минути за целосно да се испразни. Дури и откако ќе се исклучи напојувањето, плочката не смее да се допира додека не се исклучи LEDP1.
- За време на работата, BOARD мора да биде покриена со акрилна кутија за безбедност.
Услови за користење
Овие услови за користење се направени помеѓу Toshiba Electronic Devices and Storage Corporation („Ние“) и клиентите кои користат документи и податоци кои се консултирани за дизајнирање на електронски апликации на кои се монтирани нашите полупроводнички уреди („Овој референтен дизајн“). Клиентите треба да ги почитуваат овие услови за користење. Ве молиме имајте предвид дека се претпоставува дека клиентите се согласуваат со сите овие услови за користење доколку клиентите го преземат овој Референтен дизајн. Можеме, по сопствена и ексклузивна дискреција, да менуваме, менуваме, менуваме, додаваме и/или отстрануваме кој било дел од овие услови за користење во секое време без претходно известување. Можеме да ги прекинеме овие услови за користење во секое време и од која било причина. По престанокот на овие услови за користење, клиентите ќе го уништат овој референтен дизајн. Во случај на какво било прекршување од страна на клиентите, клиентите ќе го уништат овој референтен дизајн и ќе ни достават писмена потврда за да го докаже таквото уништување.
Ограничувања за употреба
- Овој референтен дизајн е даден исклучиво како референтни податоци за дизајнирање електронски апликации. Клиентите нема да го користат овој референтен дизајн за која било друга цел, вклучително и без ограничување, проверка на доверливоста.
- Овој референтен дизајн е за сопствена употреба на клиентот, а не за продажба, закуп или друг пренос.
- Клиентите нема да го користат овој референтен дизајн за евалуација во високи или ниски температури, висока влажност или високи електромагнетни средини.
- Овој референтен дизајн нема да се користи или да се вградува во какви било производи или системи чие производство, употреба или продажба е забрането според важечките закони или прописи.
Ограничувања
- во однос на овој референтен дизајн без најава.
- Овој референтен дизајн треба да се третира само како референца. Ние не сме одговорни за какви било неточни или нецелосни податоци и информации.
- Полупроводничките уреди може да не функционираат или да откажат. Кога дизајнираат електронски апликации со повикување на овој референтен дизајн, клиентите се одговорни за усогласување со стандардите за безбедност и за обезбедување соодветни дизајни и заштитни мерки за нивниот хардвер, софтвер и системи кои го минимизираат ризикот и избегнуваат ситуации во кои дефект или дефект на полупроводничките уреди може да предизвика загуба на човечки животи, телесни повреди или оштетување на имот, вклучително и губење на податоци или корупција. Клиентите исто така мора да се однесуваат и да се усогласат со најновите верзии на сите релевантни наши информации, вклучително без ограничување, спецификации, листови со податоци и белешки за апликација за полупроводнички уреди, како и мерките на претпазливост и условите наведени во „Прирачникот за доверливост на полупроводници“.
- Кога дизајнираат електронски апликации со повикување на овој референтен дизајн, клиентите мора соодветно да го оценат целиот систем. Клиентите се единствено одговорни за сите аспекти од дизајнот на нивниот сопствен производ или апликации. НЕ ПРЕЗЕМАМЕ ОДГОВОРНОСТ ЗА ДИЗАЈН НА ПРОИЗВОДИ ИЛИ АПЛИКАЦИИ НА КЛИЕНТИТЕ.
- Ние не преземаме никаква одговорност за какво било прекршување на патенти или други права на интелектуална сопственост на трети страни што може да произлезат од употребата на овој референтен дизајн. Ниту една лиценца за право на интелектуална сопственост не е дадена со овие услови за користење, без разлика дали се изразени или имплицирани, со estoppel или на друг начин.
- ОВОЈ РЕФЕРЕНТЕН ДИЗАЈН Е ДАДЕЕН „КАКО ШТО Е“. НИЕ (а) НИЕ НИКАКВА НЕ ПРЕЗЕМАВАМЕ ОДГОВОРНОСТ, ВКЛУЧУВАЈЌИ БЕЗ ОГРАНИЧУВАЊЕ, ИНДИРЕКТНИ, ПОСЛЕДНИ, ПОСЕБНИ ИЛИ СЛУЧАЈНИ ШТЕТИ ИЛИ ЗАГУБИ, ВКЛУЧУВАЈЌИ БЕЗ ОГРАНИЧУВАЊЕ, БЕЗ ОГРАНИЧУВАЊЕ, И ГУБЕЊЕ НА БЕЗ ОГРАНИЧУВАЊЕ, И ГУБЕЊЕ НА ГОЛЕМОТ ПРОФИТ, И СИТЕ ИЗРАЗНИ ИЛИ ИМПЛИЦИРАНИ ГАРАНЦИИ И УСЛОВИ ПОВРЗАНИ СО ОВОЈ РЕФЕРЕНТЕН ДИЗАЈН, ВКЛУЧУВАЈЌИ ГАРАНЦИИ ИЛИ УСЛОВИ ЗА КОРИСТЕЊЕ, СООДВЕТНОСТ ЗА ПОСЕДНА ЦЕЛИ, ТОЧНОСТ, ТОЧНОСТ, ТОЧНОСТ.
Контрола на извозот
Клиентите нема да го користат или на друг начин го ставаат на располагање овој референтен дизајн за какви било воени цели, вклучително и без ограничување, за дизајнирање, развој, употреба, складирање или производство на нуклеарно, хемиско или биолошко оружје или производи од ракетна технологија (оружје за масовно уништување). Овој референтен дизајн може да се контролира според важечките закони и прописи за извоз, вклучувајќи ги, без ограничување, Јапонскиот Закон за девизи и надворешна трговија и Регулативите за администрација за извоз на САД. Извозот и реекспортот на овој референтен дизајн се строго забранети освен во согласност со сите применливи
- Го задржуваме правото да правиме извозни закони и прописи.
Владејачки закони
Овие услови за користење ќе бидат регулирани и интерпретирани со законите на Јапонија.
© 2022 година
Корпорација за електронски уреди и складирање на Toshiba
Документи / ресурси
 |
Контролно коло на TOSHIBA TPD4204F DC 300V Влез BLDC мотор без сензори [pdf] Упатство за корисникот TPD4204F DC 300V Влезен BLDC мотор Контролно коло без сензор, TPD4204F DC 300V влез BLDC мотор, мотор со контролно коло без сензор, Мотор со кола со помалку сензор, мотор, TPD4204F |



