Netzer DS-25 Апсолутен енкодер со 17 битна резолуција

Предговор
- Верзија 2.0: ноември 2021 година
Применливи документи
- Лист со податоци за електричен енкодер DS-25
ESD заштита
Како и обично за електронските кола, за време на ракувањето со производот не допирајте електронски кола, жици, конектори или сензори без соодветна ESD заштита. Интеграторот/операторот треба да користи ESD опрема за да се избегне ризикот од оштетување на колото.
ВНИМАНИЕ
ЗАБЕЛЕЖУВАЈТЕ МЕРКИ ЗА РАКУВАЊЕ СО ЕЛЕКТРОСТАТИЧКИ ЧУВСТВИТЕЛНИ УРЕДИ
Производот завршиview
Во текот наview
Електричниот енкодер за апсолутна позиција DS-25 е револуционерен сензор за положба првично развиен за критични апликации за суровата околина. Во моментов, тој работи во широк опсег на апликации, вклучувајќи одбрана, домашна безбедност, воздушна и медицинска и индустриска автоматизација. Технологијата без контакт на Electric Encoder™ се потпира на интеракција помеѓу измереното поместување и електричното поле модулирано со простор/време. DS-25 Electric Encoder™ е полумодуларен, т.е. неговиот ротор и статорот се одвоени, при што статорот безбедно го сместува роторот.
- Статор на енкодер
- Ротор на енкодер
- Монтирање на енкодер clamps
- Прицврстувач на роторот
- Кабелски интерфејс

Табела на проток на инсталација
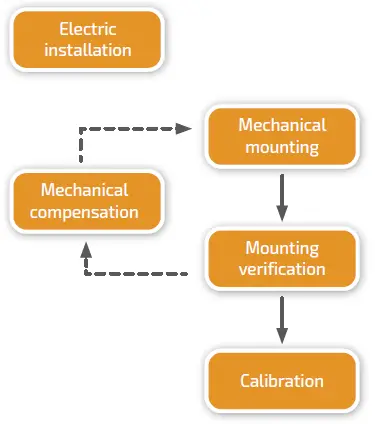
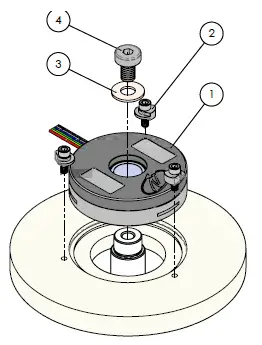
Монтирање на енкодер
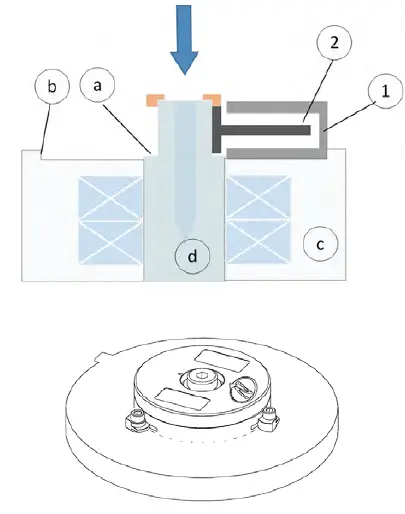
Роторот на енкодерот (2) се прицврстува на оската на домаќинот (г) со притискање на посветеното рамо (а), завртката и мијалникот или кружната пружина и мијалникот на крајот од рамото за да се одржи притисокот, препорачана сила од 0.3 Nm со завртка М3.
Статорот на енкодерот (1) е центриран со кружен чекор (б) и е прикачен на статорот домаќин (в) со помош на три енкодери clamps, препорачана сила од 0.3 Nm со испорачаниот енкодер clamps.
Забелешка:
НЕ користете материјали за заклучување со завртки кои содржат цијаноакрилат кои агресивно комуницираат со телото на сензорот направено од Ultem.
Релативна положба на статорот/роторот на енкодерот
Роторот лебди, затоа, за правилно релативно аксијално монтирање растојанието „H“ помеѓу рамото на вратилото (б) и вдлабнатината за монтирање на статорот (а) треба да биде номинално 1.4 mm.
За олеснување на механичката монтажна компензација со роторот, препорачаното растојание е 1.4 – 0.05 mm, што дава аналоген излез. Оптималната препорачана ampвредностите на литудата се во средината на опсегот според оние прикажани во софтверот Encoder Explorer и варираат во зависност од типот на енкодерот.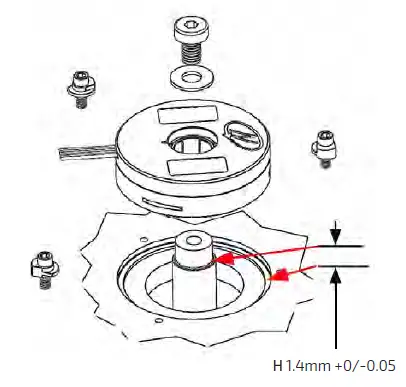
ДС-25 ampкомпензација на литуди
Механичката компензација со користење на 50 um шипки под роторот (достапна како комплет DS-25-R-00), ќе го зголеми ampниво на литуда за ~ 50 mV. Потврдете го правилното монтирање на роторот со алатките на Encoder Explorer „Анализатор на сигнали“ или „Потврда за механичка инсталација“.
Забелешка: за повеќе информации прочитајте го ставот 6
Отпакување
Стандардна нарачка
Пакетот на стандардниот DS-25 го содржи енкодерот со 250mm шилддд кабел AWG30 и комплетот EAPK004 за монтирање на енкодер clamps, (3 clamps, 0-80 UNF HEX сокет завртка L 3/16”, SS )
Изборни додатоци:
- DS-25-R-00, комплет за роторни шипки (x10 шипки од нерѓосувачки челик, по 50 мм)
- MA-DS25-004, комплет за инсталација на вратило (M3x5 завртка + мијалник)
- CNV-00003, RS-422 конвертор во USB (режим на поставување)
- Конвертор NanoMIC-KIT-01, RS-422 во USB. Поставување и оперативни режими преку SSi /BiSS интерфејс.
- DKIT-DS-25-SF-S0, монтиран SSi енкодер на ротациона жига, RS-422 во USB конвертор и кабли.
- DKIT-DS-25-IF-S0, монтиран BiSS енкодер на ротациона жига, RS-422 во USB конвертор и кабли.
Електрична интерконекција
Ова поглавје повторноviews чекорите потребни за електрично поврзување на енкодерот со дигитален интерфејс (SSi или BiSS-C).
Поврзување на енкодерот
Кодерот има два режими на работа:
Апсолутна позиција над SSi или BiSS-C:
Ова е стандардниот режим за вклучување
Код за боја на жиците за интерфејс SSi / BiSS
| Часовник + | Греј |
Часовник |
| Часовник - | Сино | |
| Податоци - | Жолта |
Податоци |
| Податоци + | Зелена | |
| ГНД | Црното | Земјата |
| +5 V | Црвено | Напојување |
Режим на поставување преку NCP (Netzer комуникациски протокол)
Овој режим на услуга обезбедува пристап преку USB до компјутер со апликација Netzer Encoder Explorer (на MS Windows 7/10). Комуникацијата е преку Netzer Communication Protocol (NCP) преку RS-422 со користење на истиот сет на жици. Користете ја следнава назначување пинови за да го поврзете енкодерот со 9-пински конектор од типот D на RS-422/USB конверторот CNV-0003 или NanoMIC.
Електричен енкодер интерфејс, тип D 9 пински женски
| Опис | Боја | Функција | Пин бр |
|
SSi часовник / NCP RX |
Греј | Часовник / RX + | 2 |
| Сино | Часовник / RX - | 1 | |
|
SSi податоци / NCP TX |
Жолта | Податоци / TX - | 4 |
| Зелена | Податоци / TX + | 3 | |
| Земјата | Црното | ГНД | 5 |
| Напојување | Црвено | +5 V | 8 |
Електрично поврзување и заземјување
Енкодерот НЕ доаѓа со одреден кабел и конектор, сепак, внимавајте на заземјувањето:
- Оклопот на кабелот не се поврзува со линијата за враќање на напојувањето.
- Заземјете го вратилото на домаќинот за да избегнете пречки од системот на домаќинот, што може да резултира со внатрешен шум на енкодерот.
Забелешка: Потребно е напојување од 4.75 до 5.25 VDC
Инсталација на софтвер
Софтверот Electric Encoder Explorer (EEE):
- Ја потврдува исправноста на механичкото монтирање
- Калибрација на офсет
- Поставува општа и сигнална анализа
Ова поглавје повторноviewсе чекорите поврзани со инсталирање на софтверската апликација EEE.
Минимални барања
- Оперативен систем: MS Windows 7/ 10, (32 / 64 битни)
- Меморија: Минимум од 4 MB
- Комуникациски порти: USB 2
- Windows .NET Framework, V4 минимум
Инсталирање на софтверот
- Стартувај го Electric Encoder™ Explorer file пронајден на Netzer webсајт: софтверски алатки за енкодер Explorer
- По инсталацијата, ќе ја видите иконата на софтверот Electric Encoder Explorer на работната површина на компјутерот.
- Кликнете на иконата на софтверот Electric Encoder Explorer за да започнете.
Потврда за монтирање
Стартување на енкодер Explorer
Погрижете се успешно да ги завршите следните задачи:
- Механичка монтажа
- Електрично поврзување
- Поврзување на енкодер за калибрација
- Encoder Explore Инсталација на софтвер
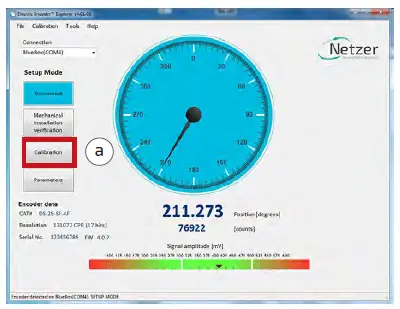
Стартувај ја алатката Електричен енкодер Explorer (EEE)
Обезбедете правилна комуникација со енкодерот: (стандарден режим на поставување).
- Статусната лента означува успешна комуникација.
- Податоците од енкодерот се прикажуваат во областа за податоци за енкодерот. (CAT бр., сериски бр.)
- Екранот на тркалцето за позиција реагира на ротација на вратилото.
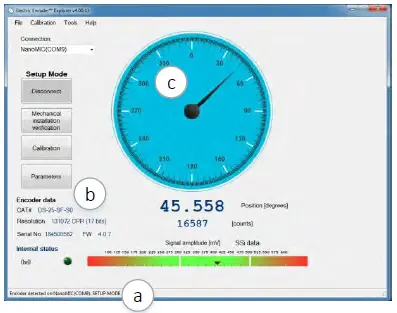
Извршете проверка на монтажата и избирање на насоката на ротација пред калибрацијата за да обезбедите оптимални перформанси. Исто така, се препорачува да се набљудува инсталацијата во прозорецот [Tools – Signal Analizer].Проверка на механичка инсталација
Верификацијата за механичка инсталација обезбедува процедура која ќе обезбеди правилно механичко монтирање со собирање необработени податоци за фините и грубите канали за време на ротацијата. - Изберете [Mechanical Mounting Verification] на главниот екран.

- Изберете [Start] за да започнете со собирање податоци.
- Завртете ја оската за да ги соберете податоците за фините и грубите канали.
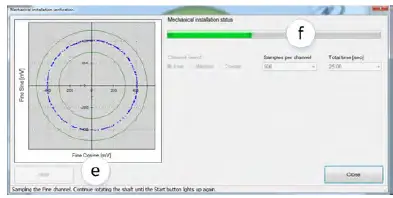
- На крајот од успешната верификација, SW ќе покаже „Правилна механичка инсталација“.
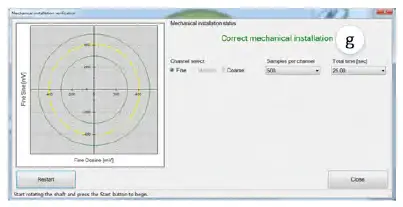
- Ако SW означува „Неправилна механичка инсталација“, поправете ја механичката положба на роторот, како што е прикажано во параграф 3.3 - „Релативна положба на роторот“.

Калибрација
Нова опција
Опцијата за автоматска калибрација е овозможена. Видете во документот: Auto-calibration-feature-user-manual-V01
Офсет калибрација
За оптимални перформанси на електричните енкодери, неизбежното поместување на DC на синусните и косинусните сигнали мора да се компензира преку оперативниот сектор.
По успешното завршување на процедурата за верификација на монтирање:
- Изберете [Calibration] на главниот екран.
- Започнете го собирањето податоци додека го ротирате вратилото. Лентата за напредок (в) го означува напредокот на наплатата. Вртете ја оската доследно за време на собирањето податоци - покривајќи го работниот сектор на апликацијата од крај до крај - стандардно процедурата собира 500 поени за 75 секунди. Брзината на ротација не е параметар за време на собирањето податоци. Индикацијата за собирање податоци покажува за фините/грубите канали, во центарот (г) (д) се појавува јасен „тенок“ круг со одредено поместување.
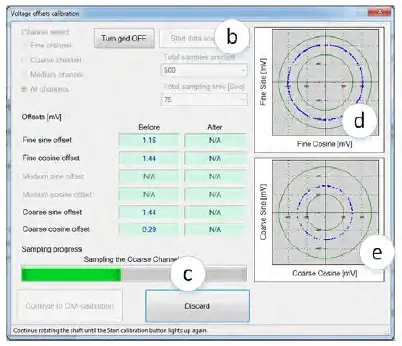
Офсет компензирана парична казна / Корсе канал 
Калибрација на АЦВ
Следната калибрација го порамнува грубиот/финиот канал со собирање податоци од секоја точка на двата канали. Изберете [Continue to CAA Calibration] Во прозорецот за калибрација на аголот на CAA, изберете го соодветното копче за опција од опциите за мерниот опсег (а):
- Целосна механичка ротација - движењето на вратилото е над 10 степени - се препорачува.
- Ограничен дел – дефинирајте ја работата на вратилото во ограничен агол дефиниран со степени во случај на <10 степени
- Слободен сampling modes – дефинирајте го бројот на точки за калибрација во вкупниот број точки во полето за текст. Системот стандардно го прикажува препорачаниот број на поени. Соберете минимум девет поени во работниот сектор.
- Кликнете на копчето [Start Calibration] (б)
- Статусот (в) ја означува следната потребна операција; статусот на движење на вратилото; моменталната позиција и следната целна позиција до која треба да се ротира енкодерот.
- Завртете го вратилото/кодерот на следната позиција и кликнете на копчето [Продолжи] (в)
- вратилото треба да биде во STAND STILL за време на собирањето на податоците. Следете ги индикациите/интеракциите за време на цикличниот процес за позиционирање на вратилото –> мирување –> пресметка на читање.
- Повторете го горниот чекор за сите дефинирани точки. Заврши (г)
- Кликнете на копчето [Save and Continue] (д).
Последниот чекор ги зачувува неутрализираните параметри на CAA, завршувајќи го процесот на калибрација.
Поставување на нулта точка на енкодерот
Нултата позиција може да се дефинира насекаде во работниот сектор. Завртете го вратилото до саканата нулта механичка положба. Одете во копчето „Калибрација“ на горната лента со мени и притиснете „Постави UZP“. Изберете „Постави моментална позиција“ како нула со користење на соодветната опција и кликнете [Finish].
Тест за нервоза
Изведете тест за нервоза за да го оцените квалитетот на инсталацијата; движечкиот тест ја прикажува статистиката за читање на апсолутните позиции (брои) со текот на времето. Вообичаеното нервоза треба да биде нагоре +/- 3 брои; повисокото треперење може да укаже на системски шум.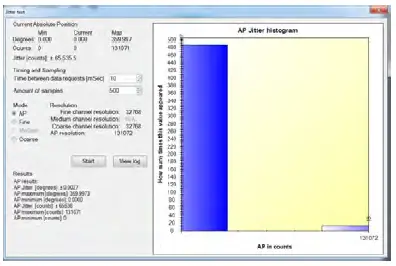
Во случај податоците за читање (сини точки) да не се рамномерно распоредени на тенок круг, може да почувствувате „шум“ при инсталацијата (проверете го заземјувањето на вратилото/статорот).
Оперативен режим
SSi/BiSS
Индикација на оперативниот режим на интерфејсот SSi / BiSS енкодер достапен со користење на NanoMIC. За повеќе информации прочитајте за NanoMIC на Netzer webлокација Оперативниот режим го претставува „вистинскиот“ SSi / BiSS интерфејс со такт од 1 MHz.
Протокол SSi
Протокол BiSS

Механички цртежи

Освен ако не е поинаку наведено
| Димензиите се во: mm | Површинска завршница: N6 |
Линеарни толеранции
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
DS-25 со метална чаура на роторот


Освен ако не е поинаку наведено
| Димензиите се во: mm | Површинска завршница: N6 |
Линеарни толеранции
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Вратило – крајна инсталација (чекор)

Освен ако не е поинаку наведено
| Димензиите се во: mm | Површинска завршница: N6 |
Линеарни толеранции
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Нема дел/опис/количина
| 1 | DS-25 | Вклучено | DS-25 енкодер | 1 | |
| 2 | EAPK004 | Вклучено | Комплет 0-80” | 3 x енкодер clampи најлон | 1 |
| 3 |
MA-DS25-004 |
Факултативно |
Комплет за инсталација на крајот на вратилото |
Машина за перење DIN125-A3.2 | 1 |
| 4 | Завртка DIN 7984 M3x5 | 1 |
Критични димензии означени со
ПРЕДУПРЕДУВАЊЕ
Не користете Loctite или други лепила што содржат цијаноакрилат. Препорачуваме да користите лепак 3M – Scotch-WeldTM епоксидно лепило EC-2216 B/A.
Длабоко, вратило - крајна инсталација (чекор)

Освен ако не е поинаку наведено
- Димензиите се во: mm Површинска завршница: N6
Линеарни толеранции
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Нема дел/опис/количина
| 1 | DS-25 | Вклучено | DS-25 енкодер | 1 | |
| 2 | EAPK005 | Факултативно | Комплет | 3 x M2 енкодер clamps | 1 |
| 3 |
MA-DS25-004 |
Факултативно |
Комплет за инсталација на крајот на вратилото |
Машина за перење DIN125-A3.2 | 1 |
| 4 | Завртка DIN 7984 M3x5 | 1 |
Критични димензии означени со „*“
ПРЕДУПРЕДУВАЊЕ
Не користете Loctite или други лепила што содржат цијаноакрилат. Препорачуваме да користите лепак 3M – Scotch-WeldTM епоксидно лепило EC-2216 B/A.
Авторски права © 2021 Netzer Precision Position Sensors ACS Ltd. Сите права се задржани.
Документи / ресурси
 |
Netzer DS-25 Апсолутен енкодер со 17 битна резолуција [pdf] Упатство за користење DS-25 Апсолутен енкодер со 17 битна резолуција, DS-25, Апсолутен енкодер со 17 битна резолуција, Апсолутен енкодер со резолуција, Апсолутен енкодер, енкодер |



